
Supervised autonomy to increase ease of use

{kind=link}
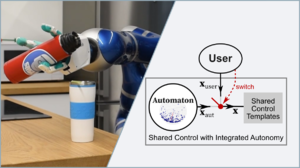
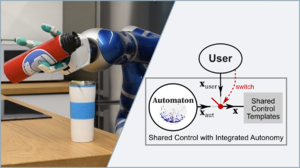
Shared control support facilitates robot control when performing daily activities. However, depending on factors such as workload, system trust, or commitment, the user may want the robot to perform a task independently. Ideally, the degree of autonomy of the robot can be freely set by the user. To make this possible, we extend the shared autonomy approach by an automatic control module (the so-called "automaton"). This automaton allows the user to switch between shared control and supervised autonomy at any time during task execution. Since both support modes use the same action representation, the transitions are seamless.
Publications
Samuel Bustamante Gomez, Gabriel Quere, Katharina Hagmann, Xuwei Wu, Peter Schmaus, Jörn Vogel, Freek Stulp, and Daniel Leidner, "Toward Seamless Transitions Between Shared Control and Supervised Autonomy in Robotic Assistance," in Proc. of the 2021 IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3833-3840, April 2021. [elib]