
ROTEX (1988–1993)
Robot Technology Experiment on Spacelab D2-Mission
ROTEX was kind of a starting shot for Germany’s participation in space automation and robotics. It contained as much sensor-based on-board autonomy as possible, but on the other side it presumed that for many years cooperation between man and machine, based on powerful telerobotic structures, will be the foundation of high-performance space robot systems, operable especially from ground. Thus ROTEX tried to prepare a lot of operational modes, such as telemanipulation on-board/on-ground as well as tele-sensor-programming from ground, not including the perfectly intelligent robot that would not need any human supervisor. The experiment also prepared different applications also aiming at assembly and external servicing. It flew with Spacelab-Mission D2 in 1993 and performed several prototype tasks, e.g. assembling a truss structure and catching a free-floating object, in different operational modes, e.g. off-line programmed, but also on-line teleoperated from ground by man and machine intelligence.
The main features of the experiment were as follows:


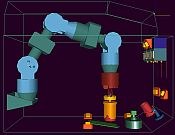
- A small, six-axis robot was mounted inside a space-lab rack.
- The robot is equipped with shared autonomy
Its gripper, probably the most complex multisensory gripper that has been built so far, was provided with a number of sensors:
- especially two 6-axis force-torque wrist sensors (a stiff strain-gauge-based and a more compliant optical one)
- tactile arrays for grasping force control,
- an array of 9 laser-range finders,
- and a tiny pair of stereo cameras to provide a stereo image out of the gripper.
- In addition a fixed pair of cameras provided a stereo image of the robot s working area.
In order to demonstrate servicing prototype capabilities three basic tasks were performed:
- assembling a mechanical grid structure
- connecting/disconnecting an Orbital-Replaceable-Unit (ORU) using a bayonet closure
- grasping a floating object.
The verified operational modes were:
- automatic, i.e. preprogramming on ground,
- teleoperation on-board, i.e. an astronaut controlled the robot using stereo-TV-monitor,
- teleoperation from ground, using predictive computer graphics, by a human operator, supported by machine intelligence,
- tele-sensor-programming, i.e. learning by showing in a completely simulated world on-ground, including the sensory perception with sensor-based execution later on-board.
The success or ROTEX was essentially based on:
- the sophisticated multisensory gripper technologies,
- the local autonomy approach using intelligent sensory feedback capabilities,
- the predictive graphics simulation concept, compensating the 5-7 seconds communication time delay.
The most considered experiment was the autonomous catching of a free-floating object. It was performed to show the capabilities of local feedback loops to remotely control a space robot under communication constraints. This experiment was the first precursor mission w.r.t. to our goal of capturing a tumbling satellite in free space for on orbit servicing.
