
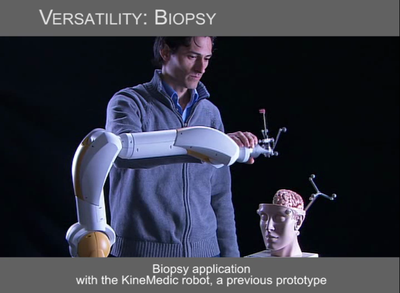
KineMedic (2002-2006)
With a self-weight of 10 kg and a maximum arm length of 1.1 m its dimensions are comparable to a human arm. Additionally the seven torque controlled joints of the robot are arranged to a shoulder (joints 1-3), an elbow (joints 4 and 5) and a wrist (joints 6 and 7), each with intersecting axes.
The seven degrees of freedom which make the robot kinematically redundant allowing a movement of the arm while the position and orientation of the tool center point remains fixed. This increases the flexibility of the robotic system and simplifies collision avoidance.
Depending on the application the robotic arm can be moved directly by the surgeon (hands-on control), telemanipulated from a master station with haptic feedback devices or operate in a fully autonomous mode.

{kind=link}


Publications
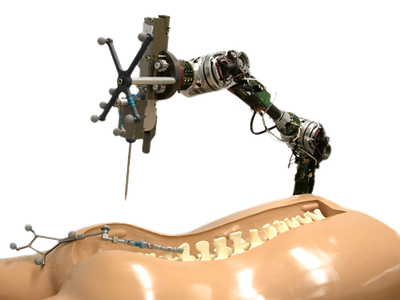
T. Ortmaier, H. Weiss, Ch. Ott, and G. Hirzinger, "A Soft Robotics Approach for Navigated Pedicle Screw Placement - first experimental results" in Proc. of the International Conference on Computer Assisted Radiology and Surgery (CARS) 2006, Osaka, Japan, 2006. elib
T. Ortmaier, H. Weiss, U. Hagn, M. Grebenstein, M. Nickl, A. Albu-Schäffer, Ch. Ott, S. Jörg, R. Konietschke, L. Le-Tien, and G. Hirzinger, "A Hands-On-Robot for Accurate Placement of Pedicle Screws", in Proc. of the IEEE International Conference on Robotics and Automation, Orlando, USA, May 2006. elib
Tobias Ortmaier, Holger Weiss, Ulrich Hagn, Markus Grebenstein, Mathias Nickl, Christian Ott, Alin Albu-Schäffer, Gerd Hirzinger, Robert Essensreiter, and Michael Bertram, "Ein neuer Roboter zum navigierten Setzen von Pedikelschrauben", in VDI Wissensforum - Mechatronik 2005, Wiesloch, Germany, June 2005, pp. 661-686. elib
H. Weiss, T. Ortmaier, and G. Hirzinger, "A New Robot for Minimally Invasive Surgery", 3. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Munich, Germany, October 2004. elib
R. Konietschke, T. Ortmaier, H. Weiss, R. Engelke, and G. Hirzinger, "Optimal Design of a Medical Robot for Minimally Invasive Surgery", 2. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Nuremberg, Germany, November 2003. elib
R. Konietschke, T. Ortmaier, H. Weiss, R. Engelke, and G. Hirzinger, "Link Length Optimisation of a Medical Robot in Minimally Invasive Surgery", in CARS 2003 - Computer Assisted Radiology and Surgery: Proc. of the 17th International Congress and Exhibition, London, United Kingdom, June 2003. elib