dSpace Force-Feedback Joystick (2003–2010)
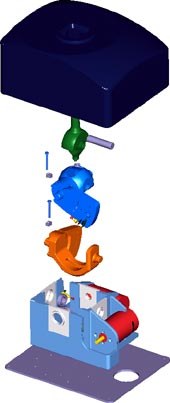
This design allows a build-up of the joysticks mechanics in a very compact space with a small amount of parts (most of them manufactured in rapid prototyping technology), so the system can be used as a desktop device or easily be integrated in other work environments (seats, control desks).
The mechanics of the DLR Force Feedback Joystick consists of a cardanic joint solution which is driven by two brushed DC motors over cable gears. The solution enables a working space on both axes of ± 20° and forces on the handle up to 10N.
The quality of the used actuators, the high resolution of the position measuring system (optical encoders coupled on the motor shaft) and the interface to the control board allows a high bandwidth (up to 5 kHz) of force feedback.
The control algorithms are implemented on a PC based DSP board DS1102 from dSpace using Texas Instruments TMS 320C31 Signal Processor. In this version, the communication between the host PC and the DSP board is done using a dual port memory. For the control software development all the dSpace software prototyping tools can be used.
Since the used gears have no backlash and very small friction the exerted force is proportional to the current command. To verify this issue, a precise force calibration is done for every joystick hardware.
Technical Data
| | |
|---|
Maximum force | 10 N |
Maximum torque | 1,2 Nm |
Gear ratio | 20:1 |
Position resolution | 0.017 ° |
Material | PU |
Size | 185 x 153 x 250 mm |
Supply Voltage | 24 V DC |
Max. power | 2 x 30 W |
System bandwidth | 10 Hz |
DSP control loop frequency | 5 kHz |
Current Control loop frequency | 40 kHz |
Applications
- Human Machine Interface for a telerobotic application using a KuKA Robot Type KR6 for contour following with force feedback support. The forces on the tool center point of the robot are measured with DLR’s compliant 6DoF Force Torque Sensor.
- Human Machine Interface for Control of Medical Simulation Model of an abdominal environment with elastic structures.
- Steer-By-Wire: Human Machine Interface for car-steering with force feedback in a hardware in the loop simulator for steer-by-wire subsystems and control algorithms