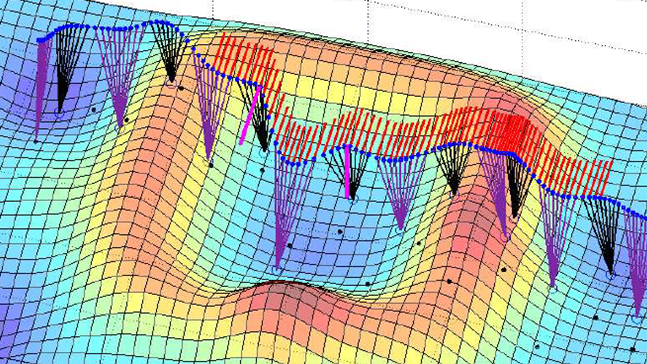
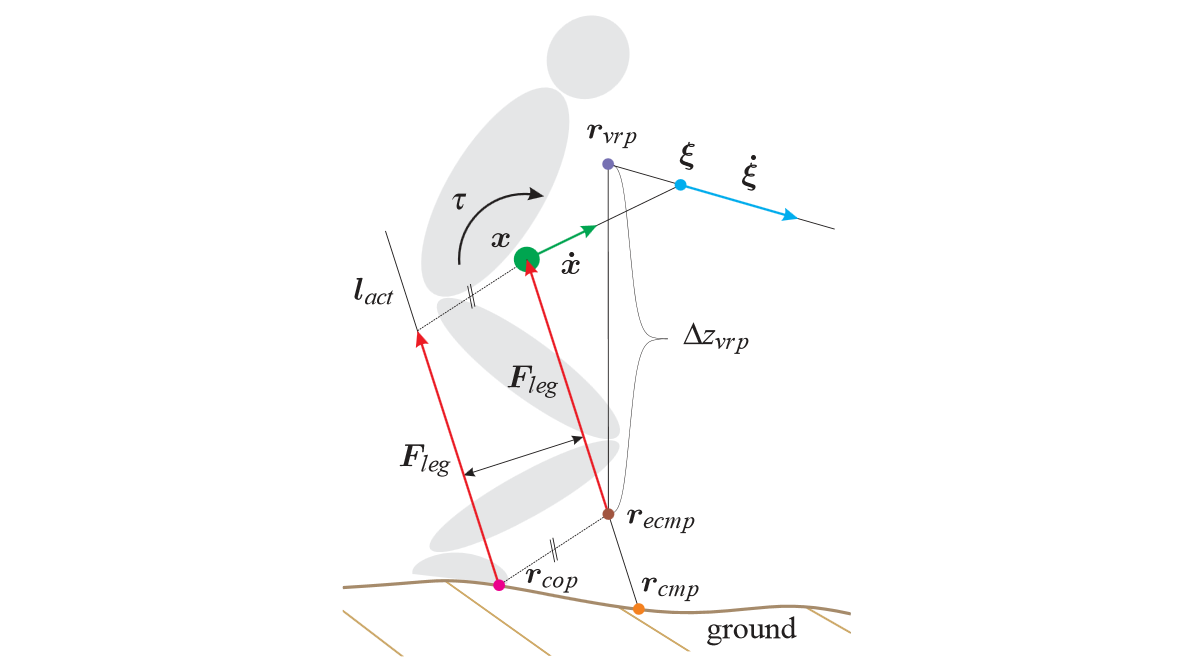
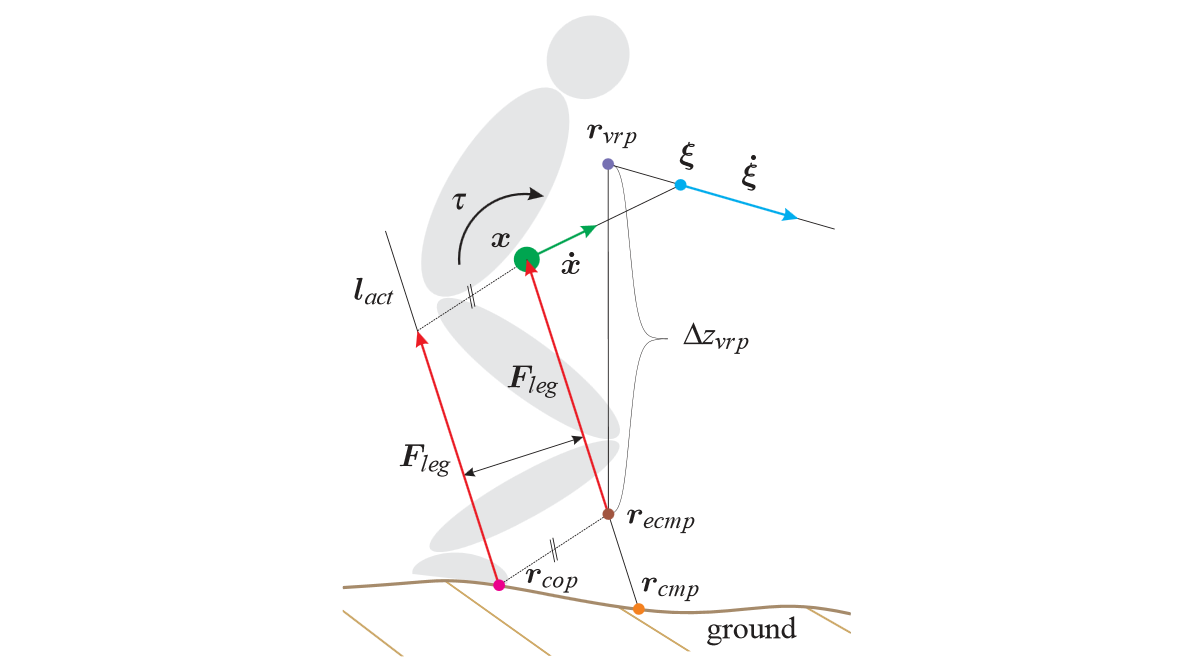
Extension of Capture Point to 3D, graphical overview
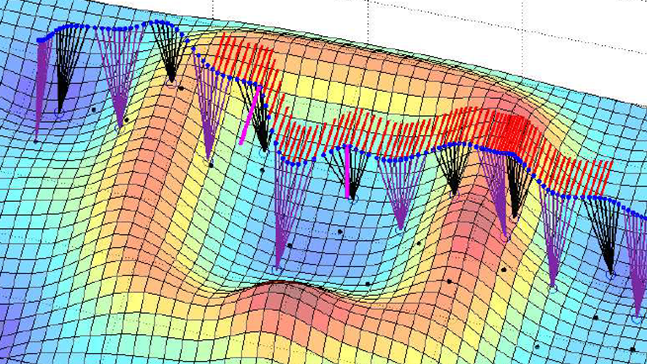
Capture Point based walking over 3D terrain
On rough and uneven terrain (such as stairs, rocks, hills), walking machines are expected to have better locomotion capabilities compared to wheeled machines. Thus, one of our research interests is the development of algorithms for bipedal walking.
Due to the complexity of the full dynamics of a humanoid robot, it is common to use simplified models – so called template models – which represent only parts of the robot’s dynamics (typically the Center of Mass (CoM) dynamics). These template models include Inverted Pendulum (IP => Compass Gait Walking), Spring Loaded Inverted Pendulum (SLIP, typically used for running and bio-inspired walking) and Linear Inverted Pendulum (LIP; used in most state-of-the-art walking robots; assumes a constant CoM height). Our work was traditionally based on the LIP. To handle the robots CoM dynamics, we used the concept of 'Capture Point' (introduced by Jerry Pratt [1] in 2006). Recently (see thumbnail of paper below), we extended the concept of 'Capture Point' to 3D, such that the CoM height is no longer constrained to be constant and walking over three-dimensional ground surfaces is facilitated (see figure).
The embedding of the concept of Capture Point into a more general multi-body control framework is part of our current efforts. This multi-body framework will make use of torque-control techniques, allowing for a robust and compliant interaction with the robot’s environment. The control framework will make use of multi-level hierarchies. Thereby, the robot will be able to do “multi-tasking” while in challenging situations all resources are available for the most critical tasks, such as balance.
The following rather old video shows our first experimental results on dynamic walking recorded at the Automatica fair in June 2010.
Experiments with TORO
B. Henze, A. Werner, M. Roa, G. Garofalo, J. Englsberger, Ch. Ott, Control Applications of TORO - a Torque Controlled Humanoid Robot, Video presented at IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS) 2014 (best video award!)
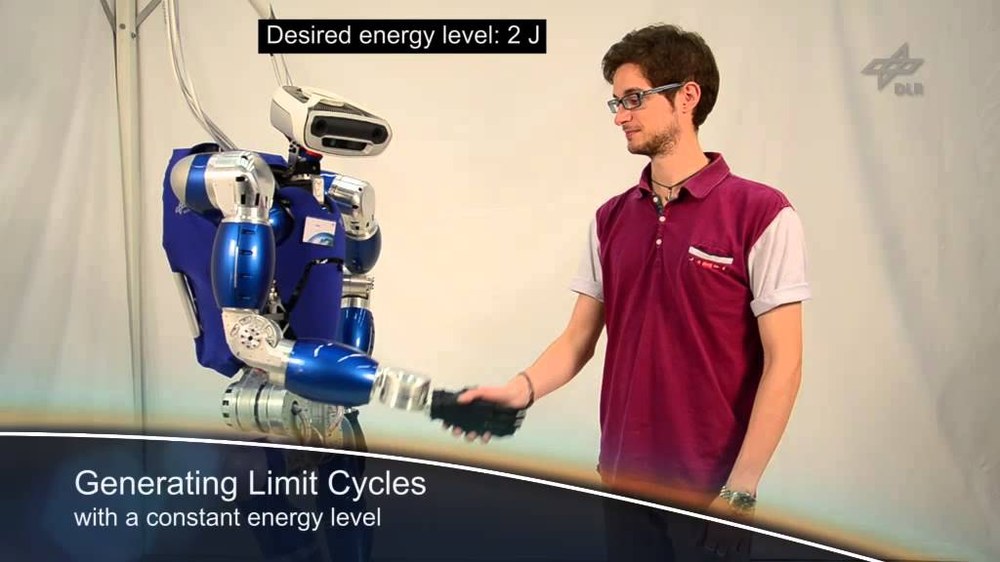
This video presents an overview of the hardware and the control applications of the TOrque-controlled humanoid RObot TORO developed at DLR. Applications include: compliant behavior for the whole robot, energy-based limit cycle controller for hand shaking, walking on flat ground, balancing on a rockerboard, and multi-contact whole-body control.
Control Applications of TORO - a Torque Controlled Humanoid Robot
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Control Applications of TORO - a Torque Controlled Humanoid Robot
This video presents an overview of the hardware and the control applications of the TOrque-controlled humanoid RObot TORO developed at DLR. Applications include: compliant behavior for the whole robot, energy-based limit cycle controller for hand shaking, walking on flat ground, balancing on a rockerboard, and multi-contact whole-body control.


{kind=link}
{kind=link}
{kind=link}