
Klassifikation
Angepasste Klassifikation für die Kategorisierung von 3D-Objekten
Ein Problem bei diesen klassischen Methoden der Objektklassifikation besteht darin, dass sie zwar mit den Daten, auf die sie trainiert wurden, gute Ergebnisse erzielen, ihre Resultate aber stark zu wünschen übrig lassen, wenn die Klassifikation in einer anderen Domäne erfolgen soll. Von einer Domäne sprechen wir, wenn Daten eines bestimmten Typs oder von einer bestimmten Quelle extrahiert oder innerhalb eines bestimmten Zeitraums erzeugt wurden. Wir können zum Beispiel einen Klassifikator an einem Datensatz trainieren, der eine große Anzahl an annotierten (gelabelten) Aufnahmen bzw. Beispielen enthält, aber in der Vorhersagephase werden die Aufnahmen von einem anderen Gerät gemacht, was zu einer Verteilung führt, die von der Verteilung bei denjenigen Aufnahmen abweicht, mit denen der Klassifikator trainiert wurde.
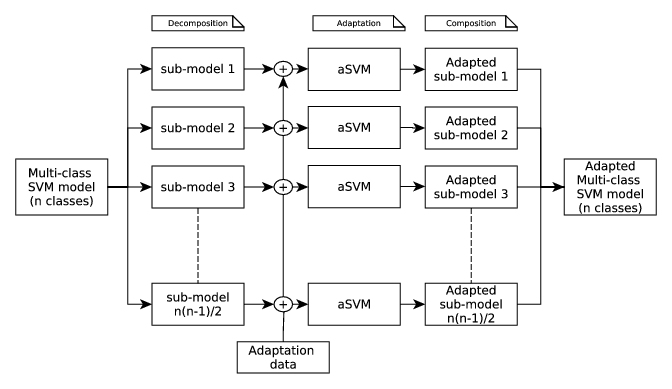
Wir betrachten dies als ein Domänenwechselproblem bei Objektklassifikatoren, wo eine Adaption des Klassifikators angewendet werden kann. Die Adaption des Klassifikators hat zum Ziel, einen Klassifikator zu entwickeln, der sich gegenüber divergierenden Verteilungen zwischen Übungs- und Prüfmustern stabil verhält. Einige Ansätze bei der Anpassung von Klassifikatoren sind bereits vorgestellt worden, aber bisher ist wenig daran gearbeitet worden, die Auswirkungen eines Domänenwechsels auf RGB-D-Daten besser zu verstehen. Der vorgestellte Adaptive SVM-Algorithmus (SVM = Support Vector Machine) wurde für eine Domänenadaptation bei binären Klassifikatoren entwickelt, die sich von unseren Klassifikatoren unterscheiden, die für ein Mehrklassen-Klassifikationsproblem trainiert wurden. Zur Lösung dieses Problems werden die libSVM-Datei-Modelle in Submodelle segmentiert, die dann jeweils selbst einen binären Klassifikator darstellen. Diese Segmentierung kann unter Berücksichtigung der libSVM-Gruppierungsregeln vorgenommen werden.

Kontextuelle Modellierung für die Objekterkennung
In natürlichen Umgebungen kommen verschiedene Objektkategorien normalerweise gleichzeitig vor (wie Auto und Fußgänger). Daher sind bei der Erkennung eines bestimmten Objektes nicht nur die von diesem Objekt gewonnenen Merkmale hilfreich, sondern auch die Identitäten anderer in derselben Szene sichtbaren Objekte. So findet man zum Beispiel eine Maus und eine Tastatur oft in der Nähe eines Computermonitors, und somit entsteht durch das häufig gleichzeitige Auftreten ein Objekt-zu-Objekt-Zusammenhang. Ein Weg zur Einbeziehung von Informationen über möglicherweise rauschbehaftete Identitäten anderer Objekte in der Szene ist die gemeinsame Optimierung der Identitäten aller erkannten Objekte mithilfe einer ordnenden oder probabilistischen Annahme eines Objektklassifikators. Wir nutzen das Markov-Zufallsfeld-Modell (MRF) für die Berücksichtigung des natürlichen oder erwarteten gleichzeitigen Auftretens verschiedener Objekte für die Verbesserung der Ergebnisse des Objektkategorieklassifikators. Darüber hinaus untersuchen wir das Social-Media-Mining als eine ergiebige Quelle für das Extrahieren des natürlichen gemeinsamen Auftretens von Objekten und analysieren die Übertragbarkeit bei der Verwendung als Hilfe beim Szene-Labeling in künstlich erzeugten Benchmark-Datensätzen. Das Konzept der Nutzung des räumlichen Kontextes stützt sich auf die Tatsache, dass bestimmte Objekte normalerweise in bestimmten Umgebungen oder in der Nähe anderer bestimmter Objekte zu finden sind. Daher ist die Modellierung dieser Beziehungen zwischen Objekten unabdingbar. Neuere Forschungsvorhaben im Bereich Computer Vision konzentrieren sich darauf, wie kontextuelle Beziehungen sich für die Verbesserung der Objekterfassung und -erkennung nutzen lassen – insbesondere im Innenbereich.
Ausgewählte Veröffentlichungen
[1] Nuricumbo, Jorge René and Ali, Haider and Marton, Zoltan Csaba and Grzegorzek, Marcin (2015) Improving object classification robustness in RGB-D using adaptive SVMs. Multimedia Tools and Applications : An International Journal, pp. 1-19. Springer US. DOI: 10.1007/s11042-015-2612-7. ISSN 1380-7501.
[2] Ali, Haider and Marton, Zoltan Csaba (2014) Evaluation of Feature Selection and Model Training Strategies for Object Category Recognition. In: IROS (ISSN: 1552-3098), 5036- 5042. International Conference on Intelligent Robots and Systems (IROS), Sept. 14–18, 2014, Chicago, Illinois. DOI: 10.1109/IROS.2014.6943278. ISSN 1552-3098.
[3] Ali, Haider and Shafait, Faisal and Giannakidou, Eirini and Vakali, Athena and Figueroa, Nadia and Varvadoukas, Theodoros and Mavridis, Nikolaos (2014) Contextual object category recognition for RGB-D scene labeling. Robotics and Autonomous Systems, 62 (2), 241 - 256. ISSN 0921-8890.