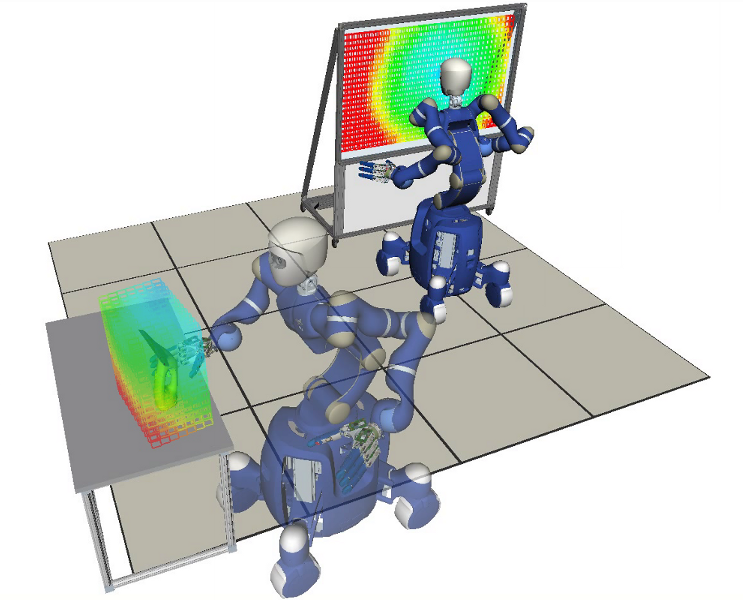
Viele Hausarbeiten erfordern es Werkzeuge über eine große Fläche zu bewegen. Das wichtigste Beispiel für eine solche Aufgabe ist die Reinigung, wobei ein Reinigungsgerät entlang einer schmutzigen Oberfläche geführt wird. Die Ausrichtung des Wekzeuges, die Bewegungsrichtung, sowie die ausgeübte Kraft und die eingestellte Steifigkeit sind dabei entscheidende Aspekte für das Reinigungsergebnis. Diese Parameter können aber nur berücksichtigt werden, wenn die Planungsebene und die Regelungsebene aufeinander abgestimmt sind. Weiterhin muss der Roboter optimal ausgerichtet sein um die komplette Region abzudecken.
Dieses Video zeigt den humanoiden Roboter „Rollin' Justin" des Deutschen Zentrums für Luft- und Raumfahrt (DLR) beim Fenster reinigen, einem typischen Beispiel für Ganzkörpermanipulation. Hybride Planung wird eingesetzt um die optimale Position des Roboters unter Berücksichtigung der Aufgabe zu bestimmen. Zusätzlich werden die Regelungsparameter für das nachgiebige Verhalten während dieser Planungsphase bestimmt. So kann der Roboter Ungenauigkeiten und externe Einflüsse kompensieren, während die Aufgabe erfüllt wird.
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Dieses Video zeigt den humanoiden Roboter „Rollin' Justin" des Deutschen Zentrums für Luft- und Raumfahrt (DLR) beim Fenster reinigen, einem typischen Beispiel für Ganzkörpermanipulation. Hybride Planung wird eingesetzt um die optimale Position des Roboters unter Berücksichtigung der Aufgabe zu bestimmen. Zusätzlich werden die Regelungsparameter für das nachgiebige Verhalten während dieser Planungsphase bestimmt. So kann der Roboter Ungenauigkeiten und externe Einflüsse kompensieren, während die Aufgabe erfüllt wird.
Daniel Leidner, Alexander Dietrich, Florian Schmidt, Christoph Borst, and Alin Albu-Schäffer, "Object-Centered Hybrid Reasoning for Whole-Body Mobile Manipulation", to be published in Proc. of the IEEE International Conference on Robotics and Automation, Hong Kong, China, June 2014.
Kontakt
Daniel Leidner
Institut für Robotik und Mechatronik
Kognitive Robotik
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling