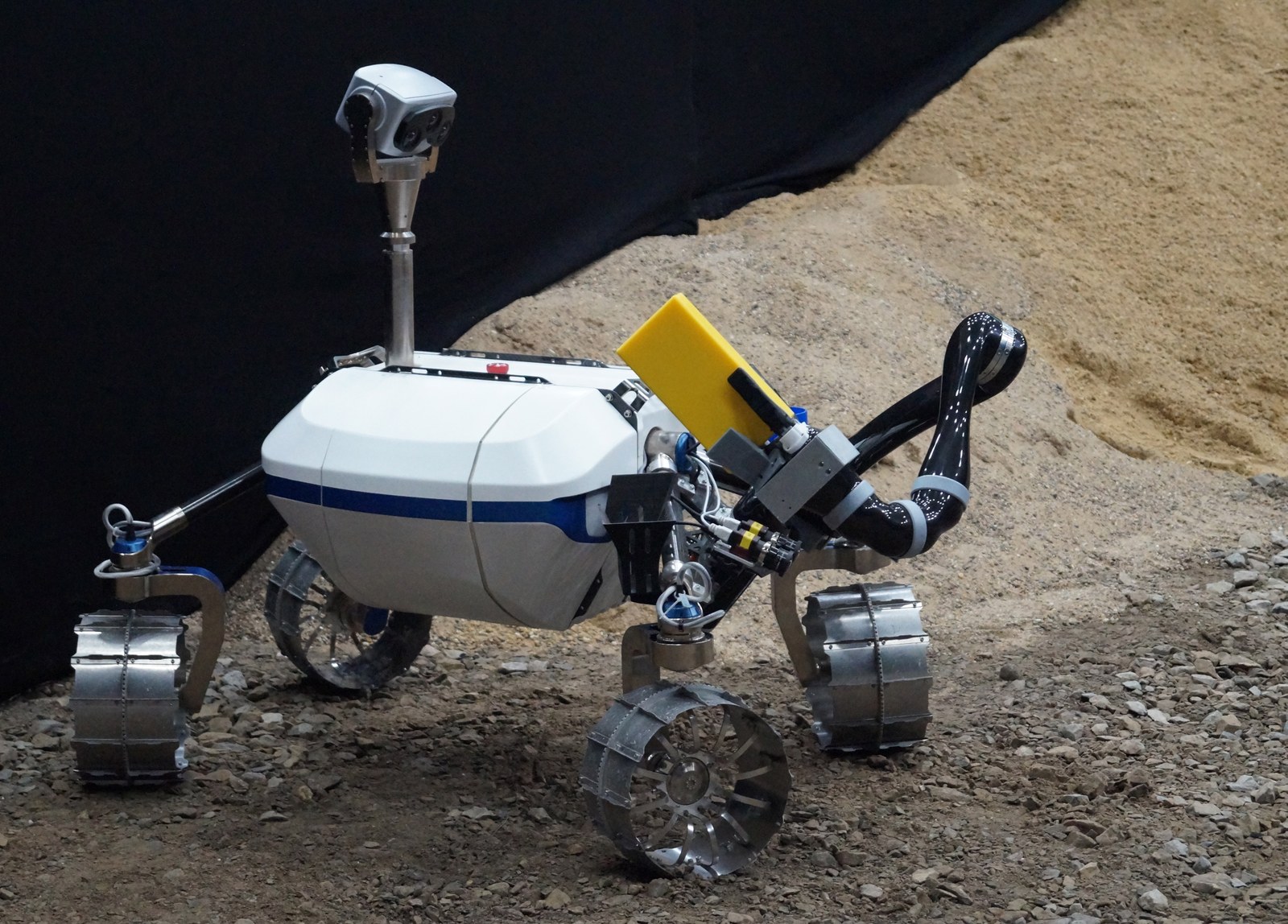
Die Lightweight Rover Unit (LRU) ist der Prototyp eines mobilen Roboters zur Exploration in unbekanntem, unwegsamem und schwer zugänglichem Gelände. Die Forschungsarbeiten zur Teilautonomie dienen als Vorbereitung für zukünftige planetare Explorationsmissionen und terrestrische Katastropheneinsätze. Im Jahr 2014 wurde der LRU erstmals der Öffentlichkeit präsentiert.
Technische Daten
Größe:
114 cm × 74 cm × 94 cm
Gewicht:
ca. 30 kg
Freiheitsgrade:
12, unterteilt in
4 Rad-Aktoren
4 Lenk-Aktoren
2 seriell-elastische Gelenke
2 Gelenke in der Pan-Tilt-Einheit (Kamera)
Nominale Nutzlast:
5 kg
Energieversorgung:
Zwei Akku-Packs (28,8 V / 5 Ah), > 60 min Betriebsdauer pro Akku-Pack
Geschwindigkeit:
1,11 m/s bzw. 4 km/h
Benutzerschnittstellen:
Direkte Fernsteuerung via Gamepad und anderen Interfaces
Autonome Wegpunkt-Navigation zu manuell eingegebenen Zielen
Besonderheiten:
Schwenk-Neige-Einheit mit einer S/W-Stereo-Kamera und einer Farb-Kamera
Gleichgewichtssensor (IMU)
FPGA-basierende Stereo-Vision mit 15 Hz (SGM)
6D-Lageschätzung und 3D-Kartierung einer unbekannten Umgebung (Mapping)
Automatische Pfadplanung, Hindernisvermeidung und Terrain-Klassifikation
Systembeschreibung
Der LRU kombiniert eine Vielzahl modernster Technologien, die am Institut für Robotik und Mechatronik entwickelt wurden, wie z.B. die Antriebs- und Lenkeinheiten, deren Motoren schon im ROKVISS-Experiment fünf Jahre lang auf der ISS ihre Weltraumtauglichkeit unter Beweis stellen konnten. Eine Stereokamera und das mehrfach ausgezeichnete Semi-Global-Matching-Stereoverfahren (SGM) verleihen dem Roboter die Fähigkeit, seine Umgebung in 3D wahrzunehmen. Hieraus berechnet der Rover Umgebungskarten und steuert dann autonom in unbekanntem und unebenem Gelände vordefinierte Ziele an. Diese selbstständige Navigation ist essentiell, da Signale von der Erde Sekunden oder Minuten benötigen und dadurch eine direkte Fernsteuerung erschwert wird. Die Erweiterung des LRU um einen auf dem System montierten Roboterarm erlaubt das Manipulieren von bekannten und unbekannten Objekten. Im Jahr 2015 hat der LRU beim SpaceBot Camp des DLR-Raumfahrtmanagements teilgenommen.
Während der ROBEX-Demo-Mission-Weltraum-Kampagne, die von Juni bis Juli 2017 auf dem Vulkan Ätna in Italien stattfand, wurden mit dem LRU einige Tests zur Langstrecken-Navigation durchgeführt.
Während der ROBEX-Demo-Mission-Weltraum-Kampagne, die von Juni bis Juli 2017 auf dem Vulkan Ätna in Italien stattfand, wurden mit dem LRU einige Tests zur Langstrecken-Navigation durchgeführt.
Wedler et al., "LRU - Lightweight Rover Unit", in Proc. of the Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), Netherlands, May 2015.
Schuster et al., "The LRU Rover for Autonomous Planetary Exploration and its Success in the SpaceBotCamp Challenge", in Proc. of the 2016 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Braganca, Portugal, May 2016.





{kind=link}
{kind=link}
{kind=link}
{kind=link}