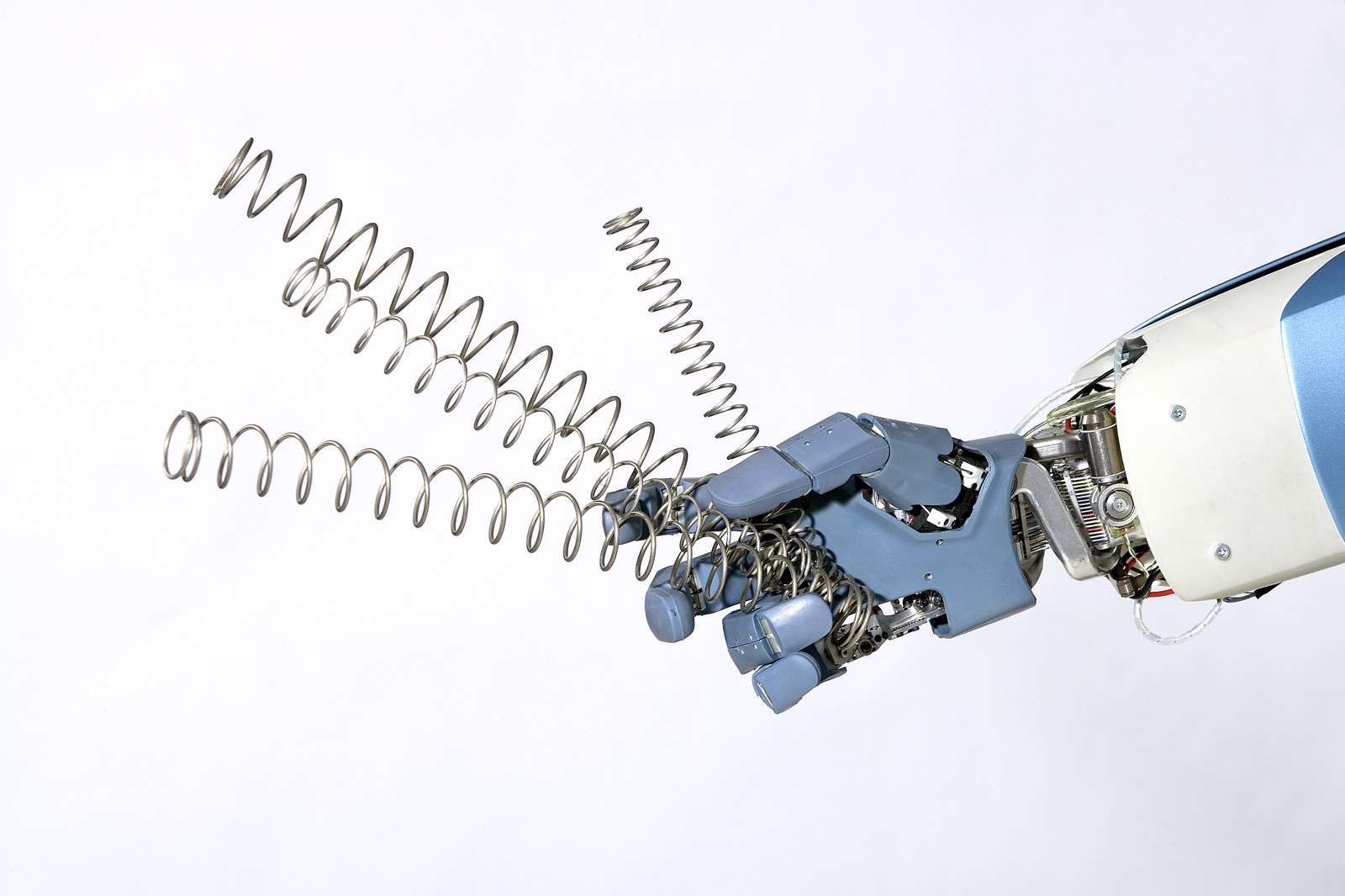
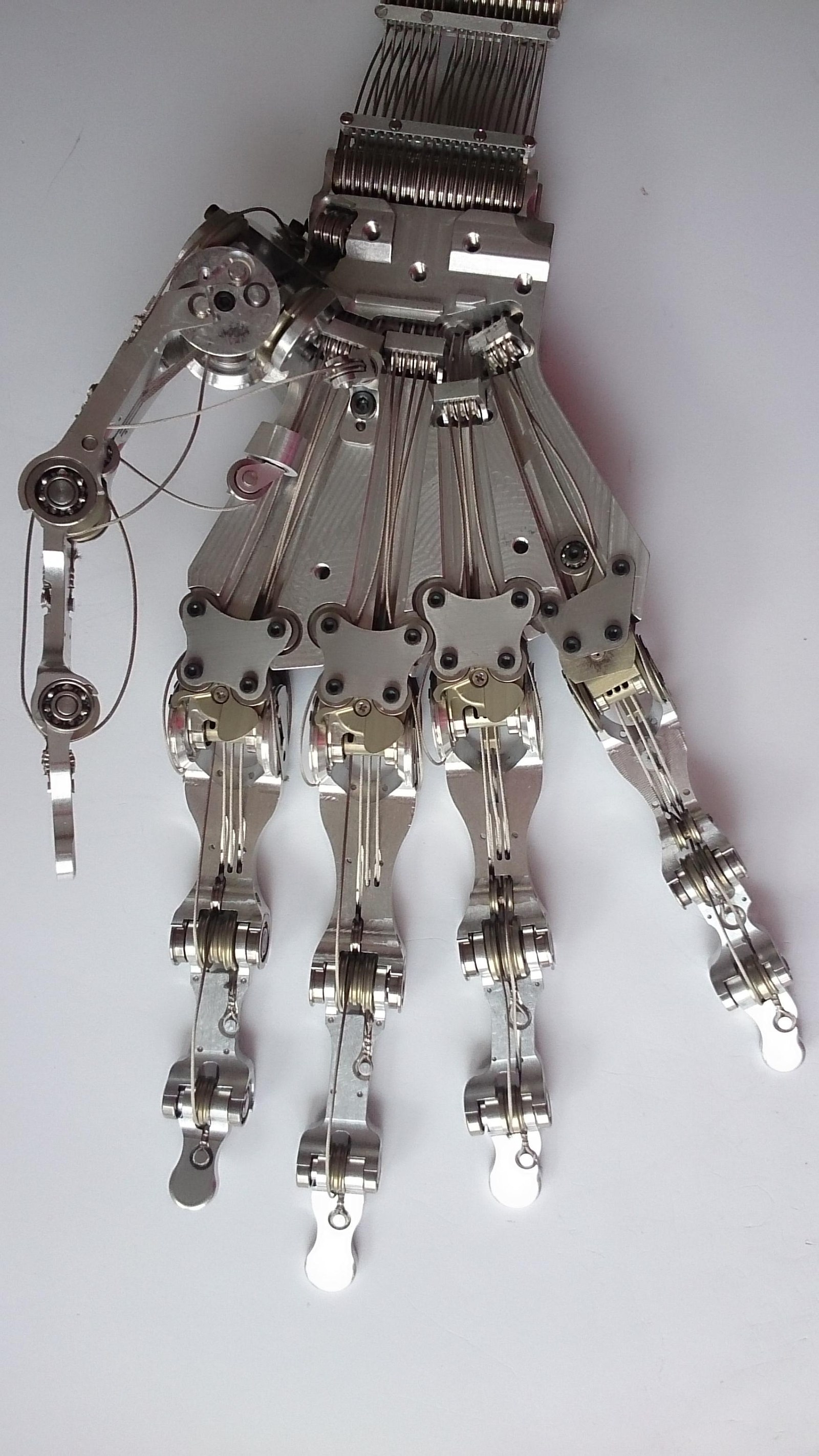
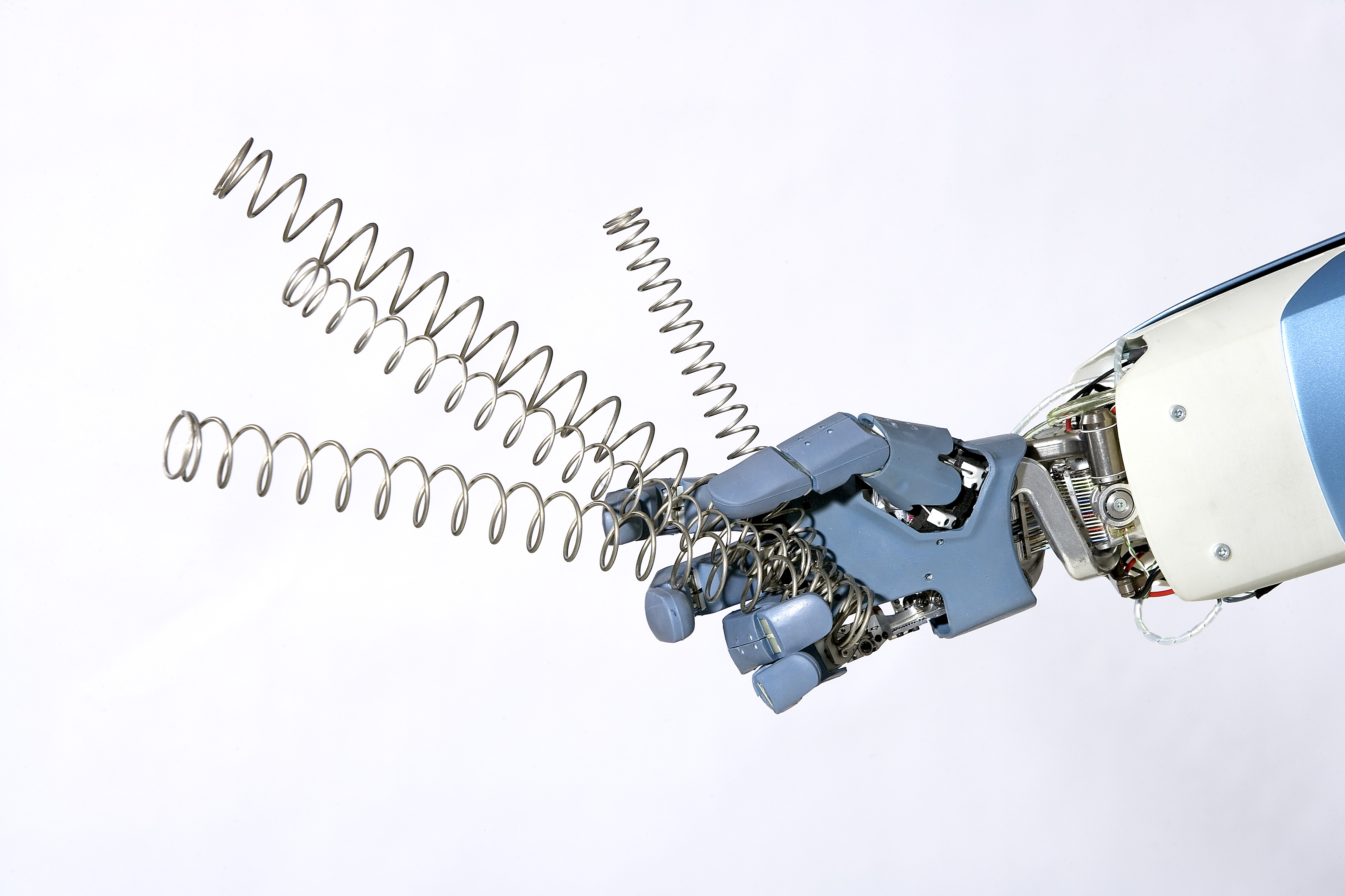
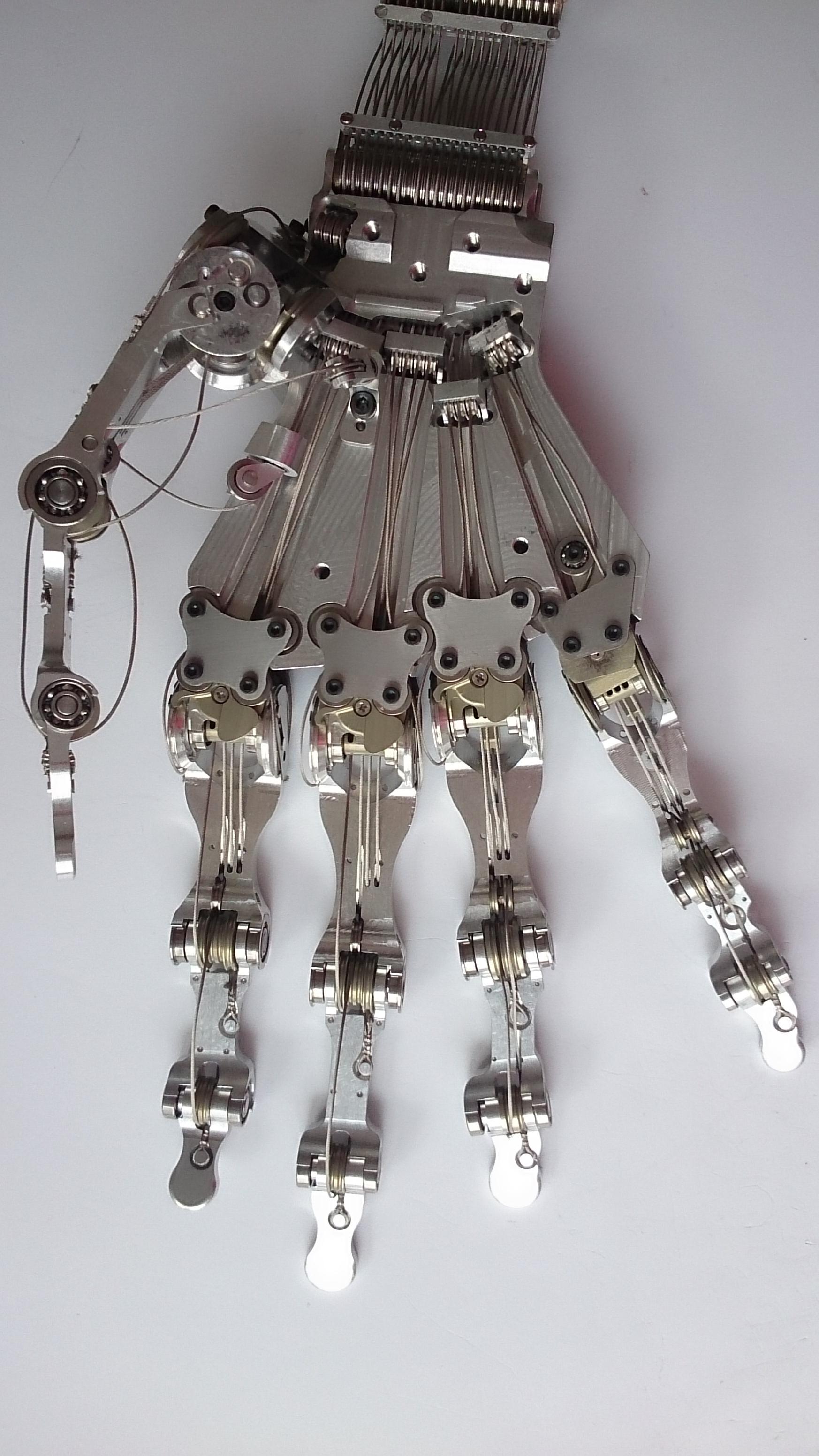
Roboterhände kommen normalerweise zuerst mit der Umgebung in Kontakt, daher sollten sie auch härtere Stöße überstehen können. Variable Nachgiebigkeitssysteme wie Robotersystem David können damit umgehen und Energie kurzseitig speichern, um diese z.B. beim Fingerschnipsen wieder freizusetzen. Die erste Version der Hand wurde 2010 auf der Messe Automatica präsentiert, 2014 folgte die zweite Variante mit kugelgelagerten Fingern, die rechts auf dem Bild zu sehen ist.
Technische Daten
Gewicht:
4,5 kg (mit integriertem Handgelenk)
Freiheitsgrade:
20
Nominale Nutzlast:
20 N aktive Fingerspitzenkraft mit Stahlsehnen, 40 N mit Dyneema
Geschwindigkeit
ca. 720°/s aktive Gelenkgeschwindigkeit, passive 20000°/s während Schnipsen
Sensorik:
36 Winkelsensor für variables Steifigkeitselement plus 36 Motorpositionssensoren
Energieversorgung:
24 V für Motoren und Elektroniken
Kommunikation:
4 FPGAs
Besonderheiten:
Eingebettete Wasserkühlung
Einbettete Stromversorgung für Antriebe
36 intelligente Motormodule
Winkelsensor für variables Steifigkeitselement
Systembeschreibung
Im Unterschied zu anderen Roboterhänden besitzt die Hand des Robotersystems David keine Sensoren und Aktuatoren in der Hand. Alle Antriebe und Sensoren befinden sich im Unterarm des Systems. Dies erlaubt es, eine Hand mit den Abmessungen und Fähigkeiten eines Menschen zu bauen. Jedes Gelenk wird wie beim Menschen antagonistisch mit zwei Motoren angetrieben. Die Hand kann mit Hilfe nichtlinearer Federelemente, die mit Seilen verkoppelt sind, gleichzeitig ihre Position sowie ihre mechanische Steifigkeit kontrollieren. Aufgrund dieser Entkopplung von Getriebe und Abtrieb ist die Hand sehr robust gegen harte Schläge. Zusätzlich kann die Hand auch bei niedrigen Reglerfrequenzen betrieben werden. Die Hand wird benutzt, um verschiedene Seilverkopplung in Software zu erproben, mit dem Ziel, eine robuste und vielseitige Roboterhand mit vergleichbar menschlichen Fähigkeiten zu erhalten.
David-Hand
Der elastische Roboter David ist mit Federn in jedem Gelenk ausgestattet, um robust gegen unvorhersehrbare Kollisionen zu sein.
Ähnlich zum Menschen besitzt Davids Hand 20 Freiheitsgrade, um eine Vielzahl an Objekten greifen zu können. Die Hand wird dabei über Sehnen durch Motoren im Unterarm angetrieben.
Friedl et al. (2015) FRCEF: The new friction reduced and coupling enhanced finger for the Awiwi hand. In: Proc. IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), 03-05 November 2015, Seoul
Friedl et al. (2011) FAS A flexible antagonistic spring element for a high performance over actuated hand. In: Proc. IEEE/RSJ Int Intelligent Robots and Systems (IROS) Conf, IROS 2011, 25.-30. September 2011, San Francisco
Chalon et al. (2010) The thumb: Guidelines for a robotic design. International Conference on Intelligent Robots and Systems (IROS 2010), 18-22 Oct 2010, Tapei
Grebenstein et al. (2010) A Method for Hand Kinematics Designers 7 Billion Perfect Hands. 1st International Conference on Applied



{kind=link}
{kind=link}