Der humanoide Laufroboter TORO (Torque-controlled humanoid robot) ist eine Forschungsplattform für wissenschaftlich Themen, die sich mit zweibeiniger Fortbewegung und Dynamik beschäftigen. Dies umfasst Aspekte wie das robuste Gehen, Treppensteigen oder Multi-Kontakt-Szenarien. Im Jahr 2013 wurde TORO erstmals der Öffentlichkeit präsentiert.
Mit dem humanoiden Roboter TORO wird das Grundproblem des Gleichgewicht-Haltens beforscht. Dabei werden Algorithmen für robustes Gehen und Balancieren sowie für die Multi-Kontakt-Regelung entwickelt. TORO basiert, genau wie sein großer Bruder Rollin' Justin, auf der Leichtbauroboter-Technologie. In fast allen seinen Gelenken kann TORO aktiv die Drehmomente regeln, so dass der eigentlich steife Roboter – je nach aktivem Regler – künstlich nachgiebig gemacht werden kann. Anders als bei positionsgeregelten Robotern verspricht diese Nachgiebigkeit ein Plus an Sicherheit bei der Interaktion mit Menschen sowie eine höhere Robustheit beim Kontakt mit der Umgebung. TORO bietet die Möglichkeit, positions- und drehmomentbasierte Regelungskonzepte miteinander zu vergleichen. Im Bereich der Ganzkörperregelung werden impedanzbasierte mit inversdynamischen Regelungskonzepten verglichen.
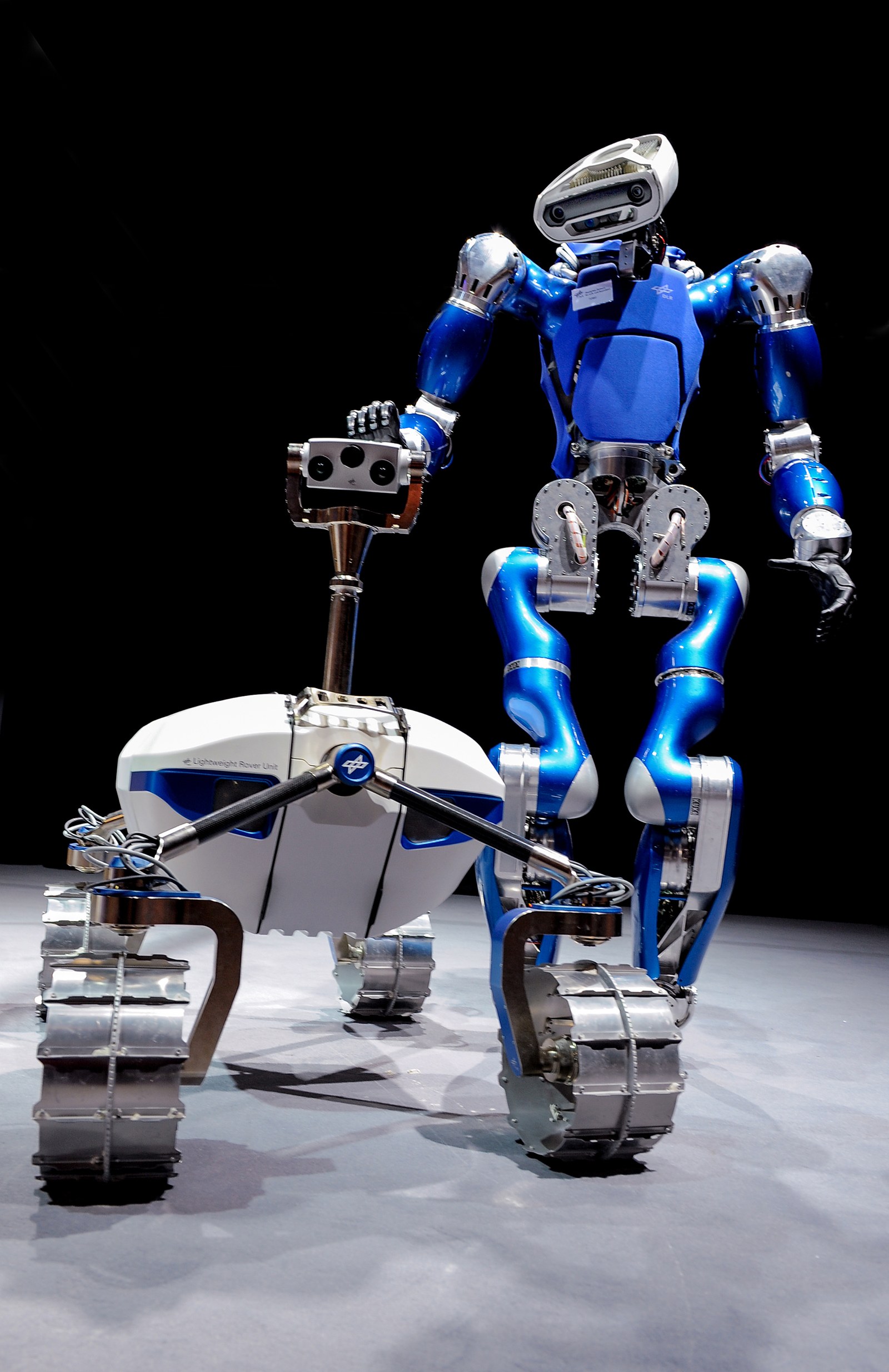
LRU und Toro auf der ILA 2014
Auf der ILA 2014 präsentierte das Institut für Robotik und Mechatronik den Rover LRU und den Laufroboter Toro.
Die Form von TORO wurde der des Menschen nachempfunden. Drehmomentsensoren in fast allen Gelenken erlauben es dem System, beispielsweise Kollisionen oder Interaktionskräfte mit seiner Umgebung zu fühlen und dementsprechend sicher und nachgiebig zu reagieren.
Bernd Henze, Alexander Dietrich, Máximo A. Roa, and Christian Ott: “Multi-Contact Balancing of Humanoid Robots in Confined Spaces: Utilizing Knee Contacts”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 679–704, 2017. [elib]
Bernd Henze, Alexander Dietrich, Christian Ott: "An Approach to Combine Balancing with Hierarchical Whole-Body Control for Legged Humanoid Robots”, IEEE Robotics and Automation Letters (RA-L), vol. 1, no. 2, pp. 700–707, 2016. [elib]
Bernd Henze, Máximo A. Roa, Christian Ott: "Passivity-Based Whole-Body Balancing for Torque-Controlled Humanoid Robots in Multi-Contact Scenarios”, The International Journal of Robotic Research, vol. 35, no. 2, pp. 1522–1543, 2016. [elib]
Englsberger et al., "Overview of the torque-controlled humanoid robot TORO", in Proc. of the 2014 IEEE/RAS International Conference on Humanoid Robots (HUMANOIDS), Madrid, Spain, pp. 916-923, November 2014. [elib]




{kind=link}
{kind=link}
{kind=link}
{kind=link}