SwarmRail ist eine neuartige Lösung für die Überkopfmanipulation von einer mobilen Einheit aus, die in einer übererdigen Schienenstruktur fährt.
Das System wurde auf der internationalen Konferenz ICRA 2020 zum ersten Mal der Öffentlichkeit vorgestellt.
Technische Daten des Funktionsdemonstrators
Größe:
362 mm × 362 mm × 263 mm (L × B × H)
Gewicht:
~ 17,5 kg
Geschwindigkeit:
0,5 m/s
Nominale Nutzlast:
10 kg
Motoren:
4 x bürstenbehafteter DC-Getriebemotor (Pololu 4752)
Sensoren:
4 × IR Spalterkennung (EXP-R63-145) 8 × IR Kantenerkennung (Iduino ST1081) 1 × IMU (6DOF MPU6050)
Räder:
8 × angetriebene Omni-Wheels (Rotacaster R2-0504-60) 8 × passive Omni-Wheels am unteren Teil des Geräts
CPU:
Arduino Mega 2560
Regelfrequenz:
100 Hz
Video
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
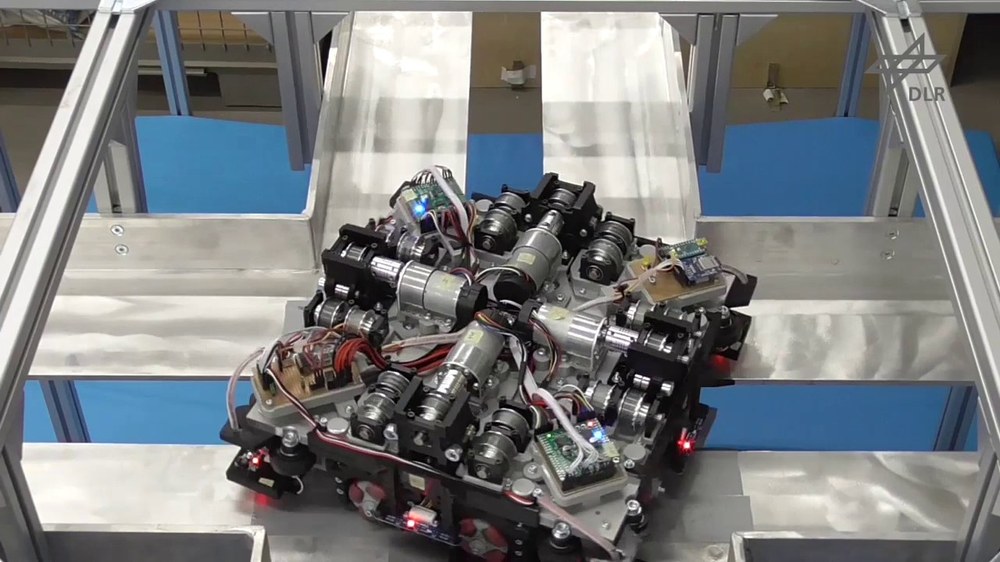
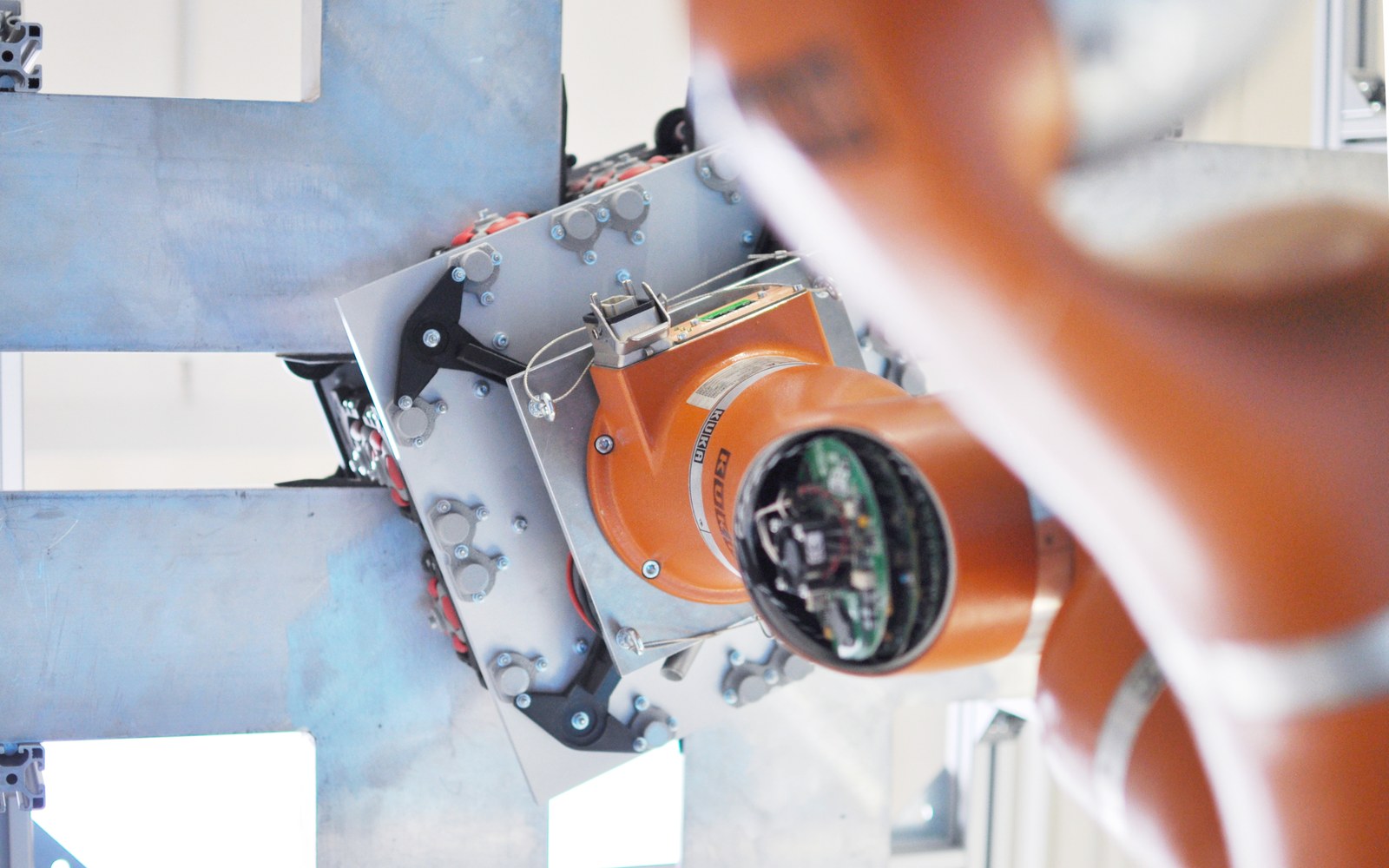
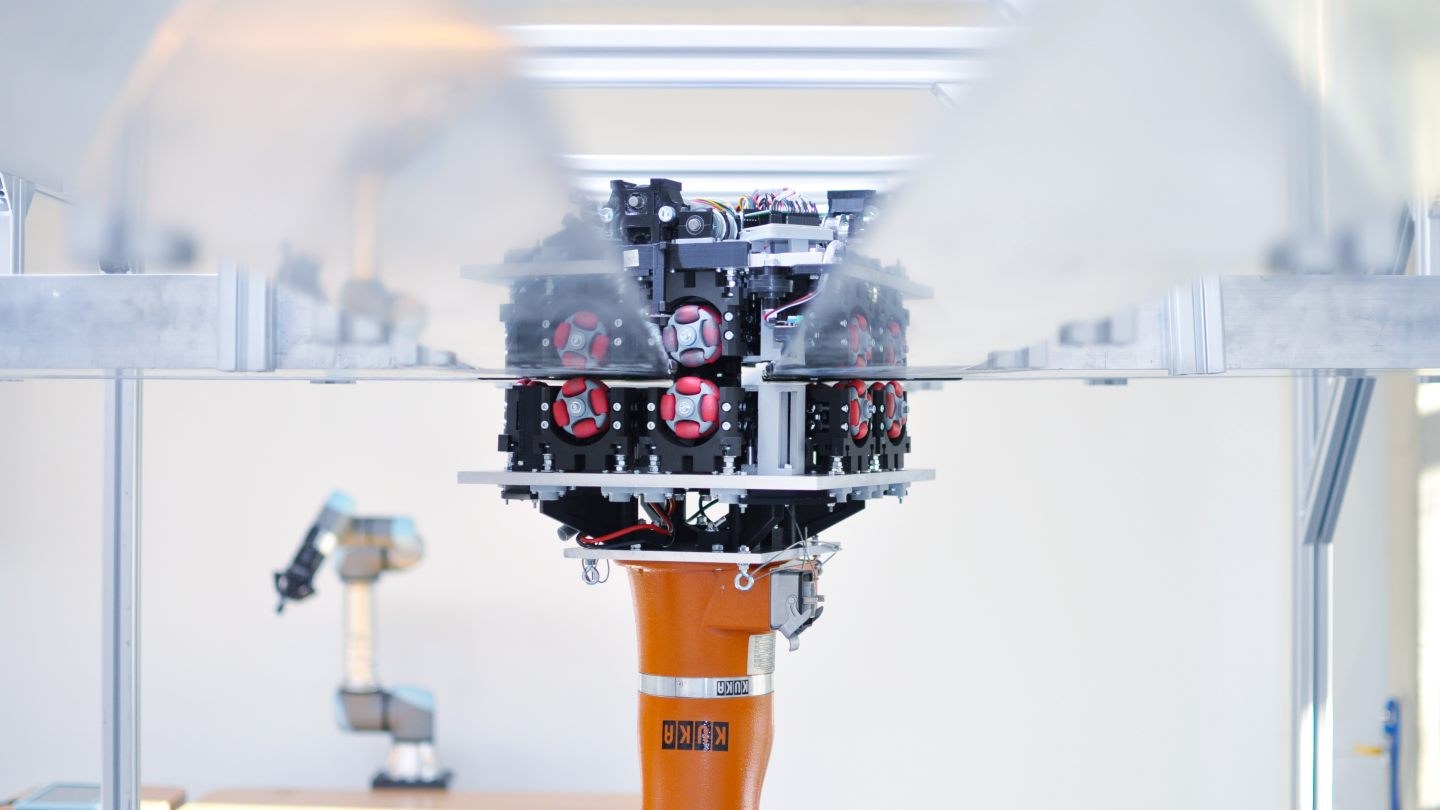
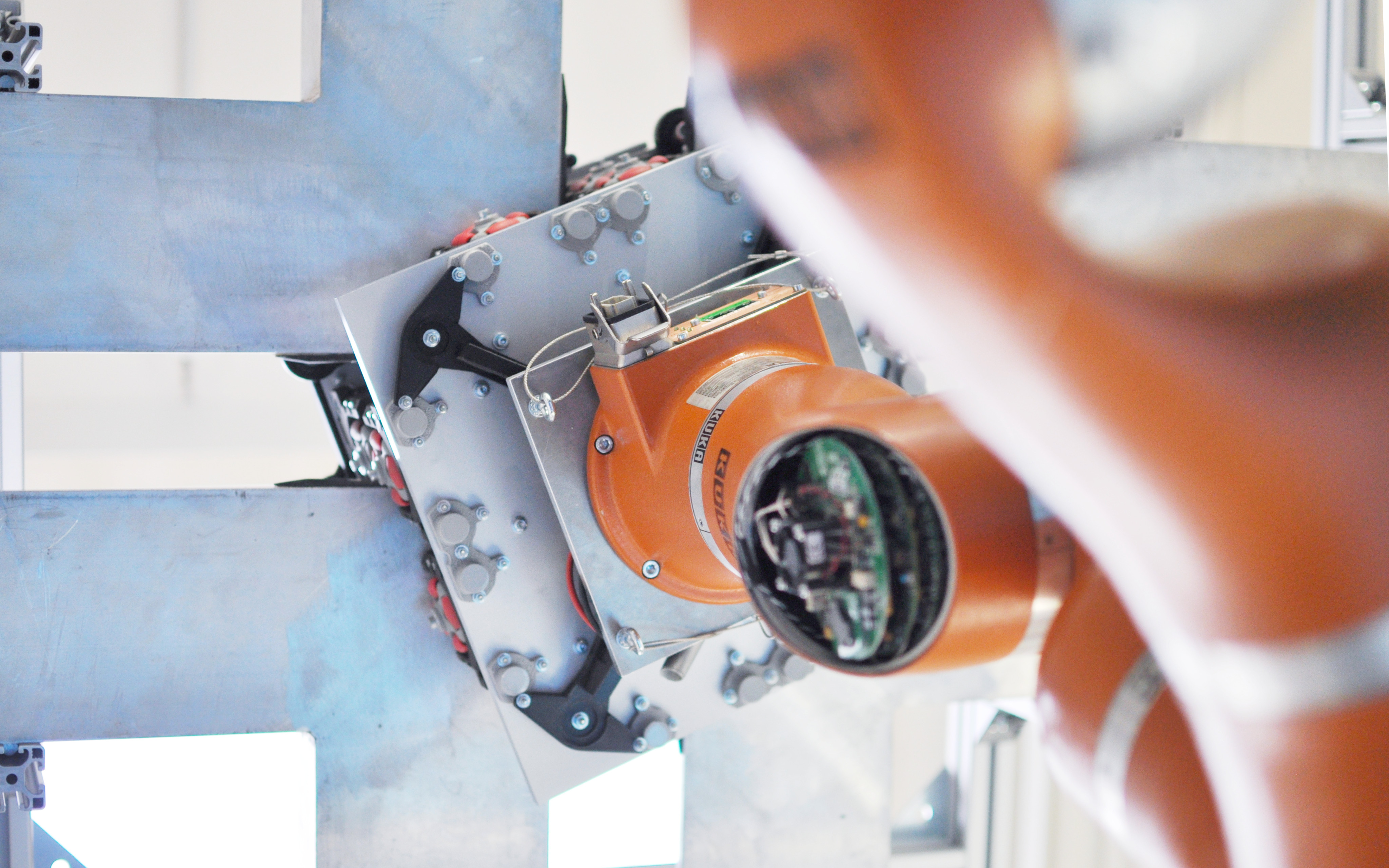
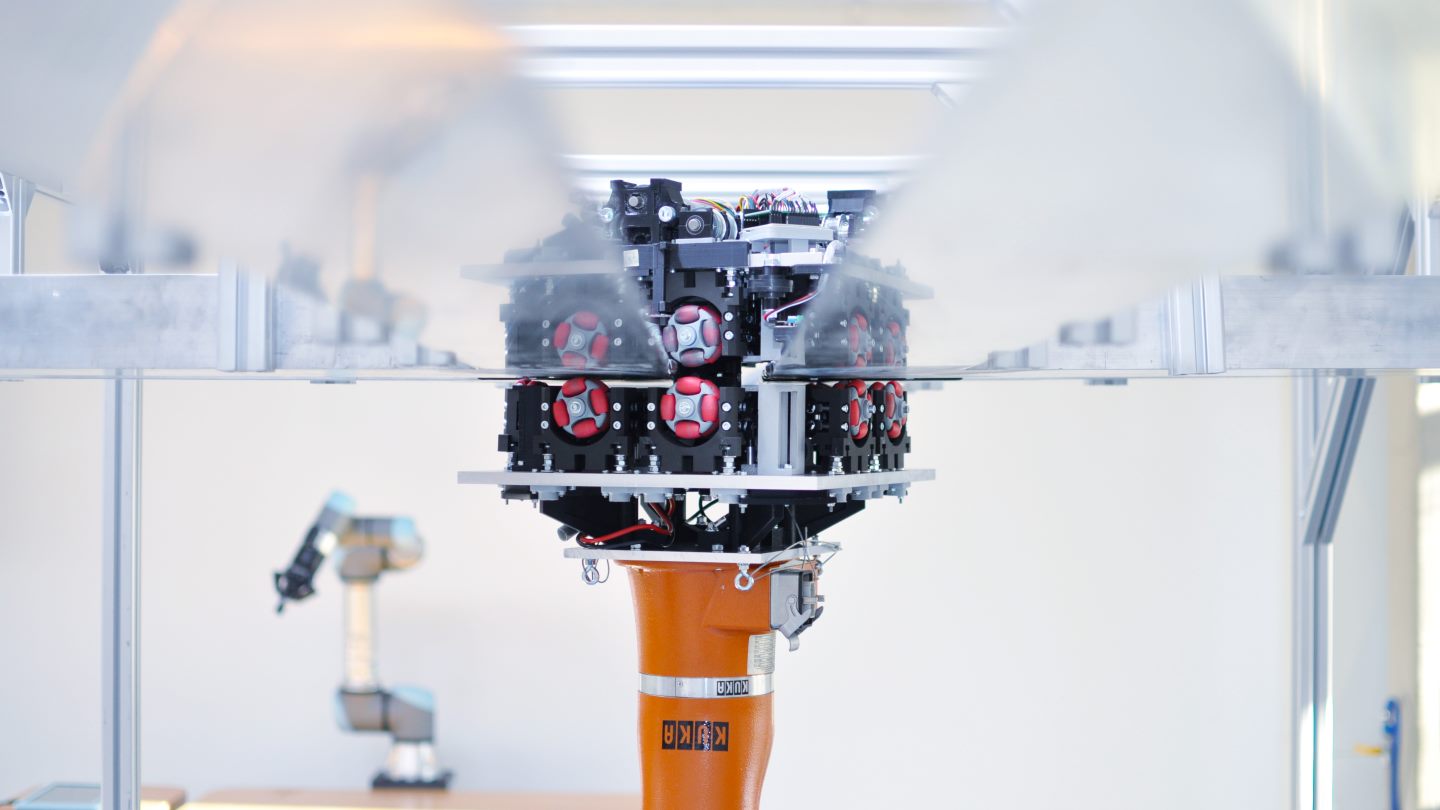
Das SwarmRail-Konzept basiert auf dem Zusammenspiel einer omnidirektionalen mobilen Plattform und L-förmiger Schienenprofile, die einen zentralen, durchgehenden Spalt bilden. Dieser Spalt ermöglicht die hängende Montage eines Roboterarmes an der Unterseite der mobilen Plattform. Im Vergleich zu bestehenden Lösungen ermöglicht SwarmRail eine kontinuierliche Überkopfmanipulation, auch während des Durchfahrens von Schienenkreuzungen.Der Einsatz in einem Schwarm von Robotern ist ebenfalls möglich, da es den gleichzeitigen Betrieb einer Gruppe von mobilen SwarmRail-Einheiten innerhalb eines einzigen Schienennetzes ermöglicht. Experimente an einem ersten funktionalen Demonstrator bestätigen die praktische Umsetzbarkeit des Konzepts. Mögliche Anwendungsfelder reichen von der Industrie über die Logistik bis hin zur vertikalen Landwirtschaft.
SwarmRail-Unit mit Leichtbauroboter als Manipulator



{kind=link}
{kind=link}