
Premiere für die deutsche Weltraum-Robotik - Roboterarm aus Oberpfaffenhofen bewegt sich im freien Weltraum
Roboterarm ROKVISS auf der Internationalen Raumstation ISS hat nach erfolgreichen Tests mit dem Routinebetrieb begonnen

{kind=link}
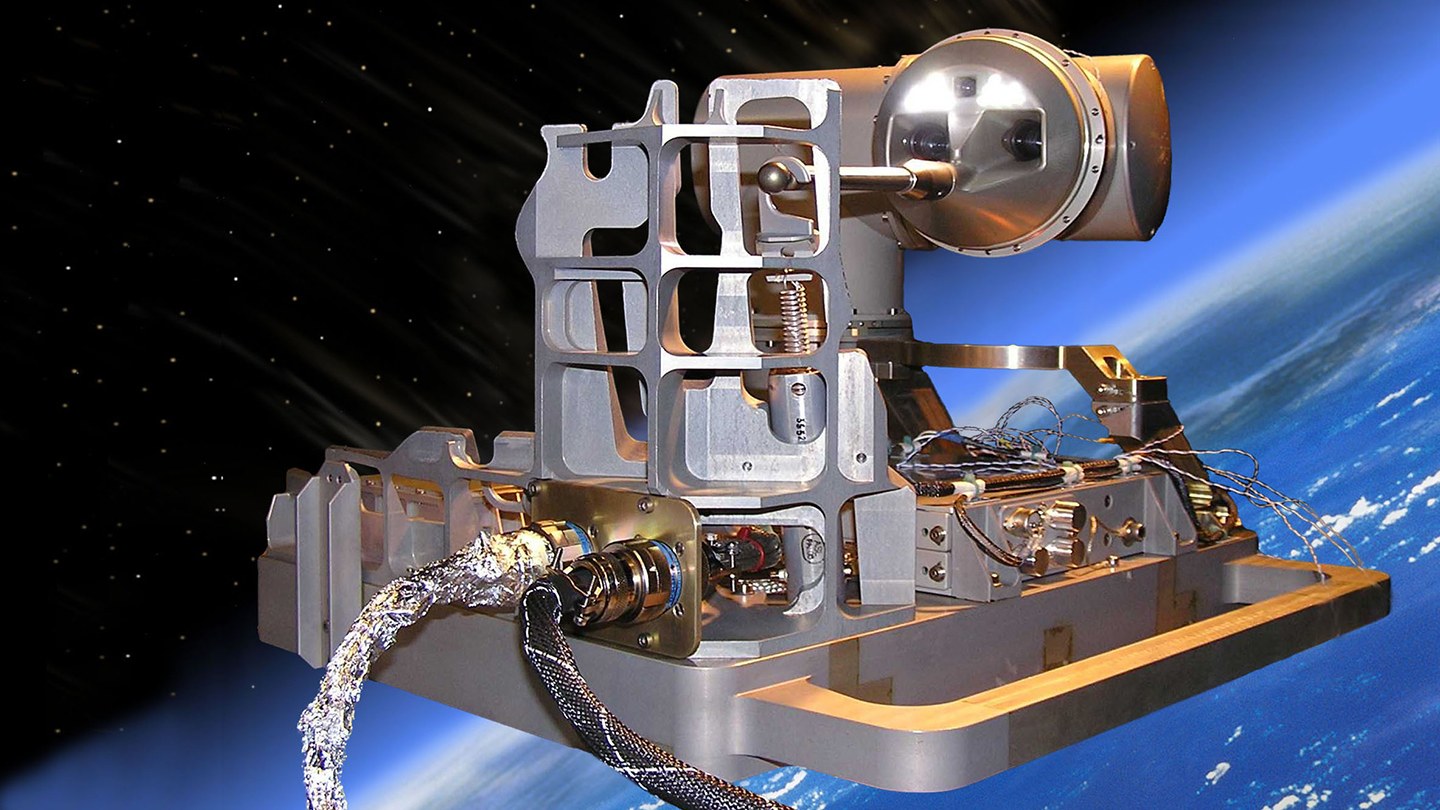
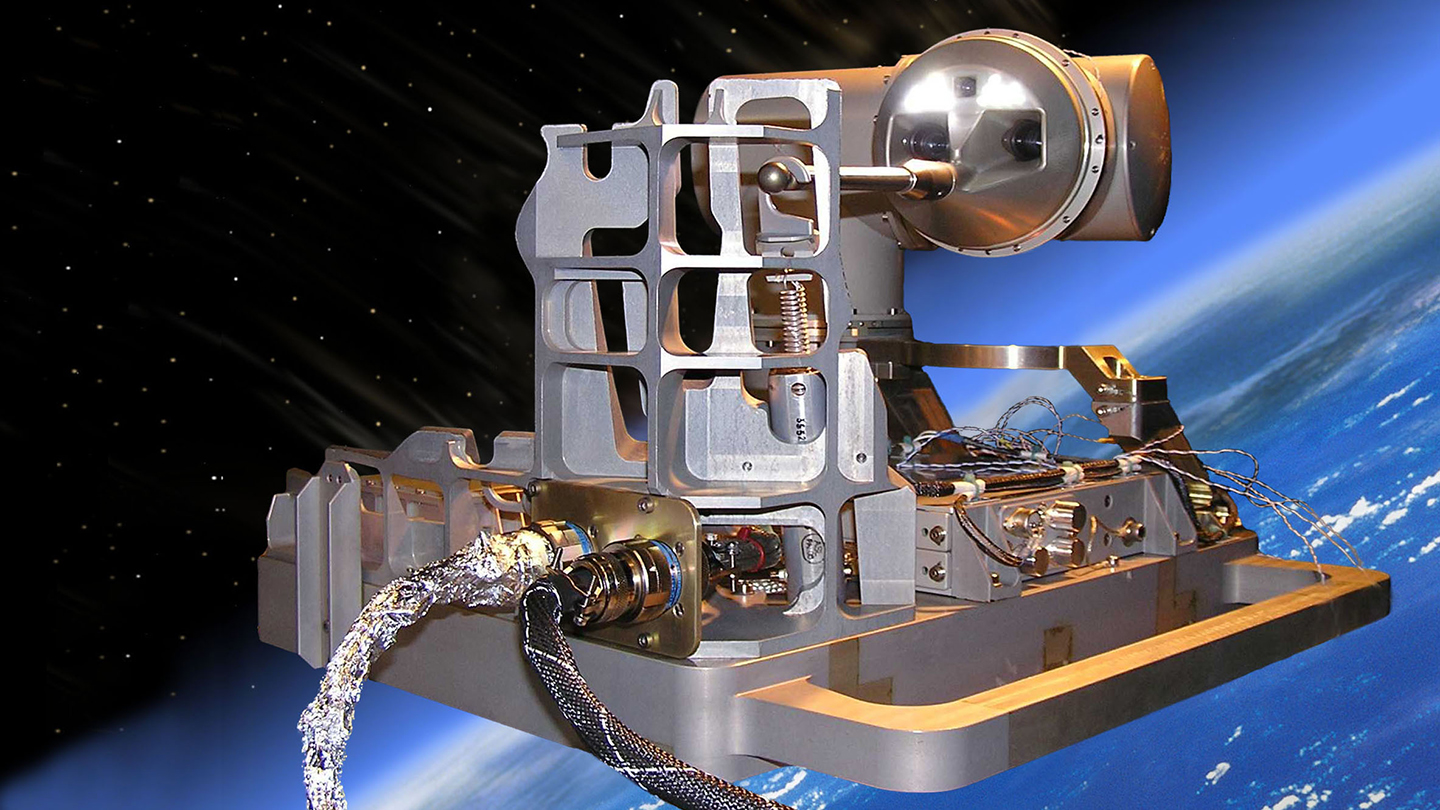
Köln/Oberpfaffenhofen - Für die deutsche Weltraum-Robotik begann am 22. März 2005 um 13.30 Uhr MEZ mit der ersten Bewegung eines deutschen Roboters im freien Weltraum ein neues Kapitel. Das vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelte innovative Robotik-Experiment ROKVISS (Robotik-Komponenten-Verifikation auf der ISS) hat somit seine Arbeit auf der Internationalen Raumstation ISS aufgenommen. Damit wurde ein entscheidender Schritt bei der Durchführung des Experimentes getan: Alle Systeme funktionieren normal und der eigentliche, für ein Jahr geplante, Routinebetrieb des Experiments unter den harten Weltraumbedingungen wurde gestartet. Der rund 50 Zentimeter große Roboterarm mit zwei Gelenken, einem Metallfinger und zwei integrierten Kameras wurde vom Boden aus angesteuert und setzte sich dann in der so genannten automatischen Betriebsart in Bewegung. Konkret wurden Befehlsfolgen zur ISS gesandt, die dann später von der Robotik-Einheit selbstständig und wie programmiert automatisch ausgeführt wurden. Durchgeführt wurde dieser Test vom ROKVISS-Projektteam während des rund sechsminütigen Überfluges der ISS über die DLR-Bodenstation in Weilheim, südwestlich von München.
Direkte Roboter-Steuerung fast ohne Zeitverzögerung geplant
Für Anfang April 2005 ist ein weiteres anspruchsvolles Experiment geplant: Dann soll der Roboterarm im Weltraum mit einer extrem geringen Zeitverzögerung von nur rund zehn Millisekunden von Weilheim aus direkt gesteuert werden. Diese Telepräsenz-Betriebsart stellt ein Novum in der Weltraumrobotik dar und wird als wesentliche technische Voraussetzung für zukünftige Service- und Reparaturaufgaben im All angesehen.
Ziel des in Deutschland geplanten und entwickelten Experimentes ist es, neue Roboterhardware und leistungsfähige Steuerungskonzepte im realistischen Missionsbetrieb zu testen und zu verifizieren. Zukünftig soll diese innovative Robotertechnologie Astronauten bei komplizierten Arbeiten unterstützen und entlasten. Zudem könnte es die vom Boden gesteuerte Reparatur von Satelliten ermöglichen.
Anfang Dezember 2004 hatte der deutsche Roboterarm alle abschließenden Tests in Moskau erfolgreich absolviert. Am 23. Dezember 2004 startete ROKVISS um 23.19 Uhr MEZ mit einer russischen Sojus U-Rakete zur Internationalen Raumstation ISS.
Wichtiges Projekt für deutsche Raumfahrt-Industrie und -Forschung
Finanziert wird das Projekt vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF). EADS Space Transportation in Bremen war als Hauptauftragnehmer für die Systemintegration sowie für wesentliche Komponenten der On-board Software verantwortlich. Das DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen entwickelte und baute die Robotik-Komponenten und ist für die Experimentdurchführung sowie für die wissenschaftliche Auswertung der Ergebnisse verantwortlich. Die Firma Kayser-Threde aus München ist für Entwicklung und Bau des Experimentcomputers, die Stromversorgung und die technische Unterstützung des DLR-Instituts zuständig. Das Unternehmen Hoerner & Sulger lieferte die Kameraausrüstung mit Elektronikzubehör. Das Management des Projektes erfolgt durch die Raumfahrt-Agentur des DLR. Die Durchführung der Mission basiert auf einer Vereinbarung zwischen der Raumfahrt-Agentur des DLR, den russischen Partnern ROSKOSMOS und RKK Energija sowie dem Münchner Unternehmen Kayser-Threde als Hauptauftragnehmer für die S-Band-Kommunikationsinfrastruktur.
Die Kosten für das Experiment ROKVISS belaufen sich auf 11,5 Millionen Euro einschließlich 3,5 Millionen Euro für Start, Montage und Betrieb auf der ISS, die Deutschland an die russischen Vertragspartner zahlt.
Bild- und Videomaterial ist erhältlich bei:
Rainer Karnowski, EADS Space Transportation