
Neues deutsches Robotik-Experiment ROKVISS auf der ISS
Test der intelligenten Roboter-Gelenkeinheiten für zukünftige bemannte und unbemannte Missionen
Das deutsche Technologie-Experiment ROKVISS (RObotik-Komponenten-Verifikation auf der ISS) dient dem Test von hoch integrierten, modularen Roboter-Komponenten unter den Bedingungen des freien Weltraums. Es wurde entwickelt vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) im Oberpfaffenhofener Institut für Robotik und Mechatronik. Gleichzeitig dient das Experiment zur Demonstration verschiedener neuer Kontrollverfahren, sowohl im automatischen wie auch im so genannten Tele-Präsenz-Betrieb. Die experimentelle Flugeinheit wird nach dem Start mit einem russischen Progress-Raumschiff im Dezember 2004 im Januar 2005 außen an der Internationalen Raumstation ISS installiert. Dort wird das Experiment rund ein Jahr lang betrieben.

{kind=link}
Die zum Einsatz kommenden Komponenten werden die Basis für neue Leichtbau-Robotikelemente bilden, die im Rahmen von zukünftigen bemannten oder unbemannten Raumflugmissionen genutzt werden sollen.
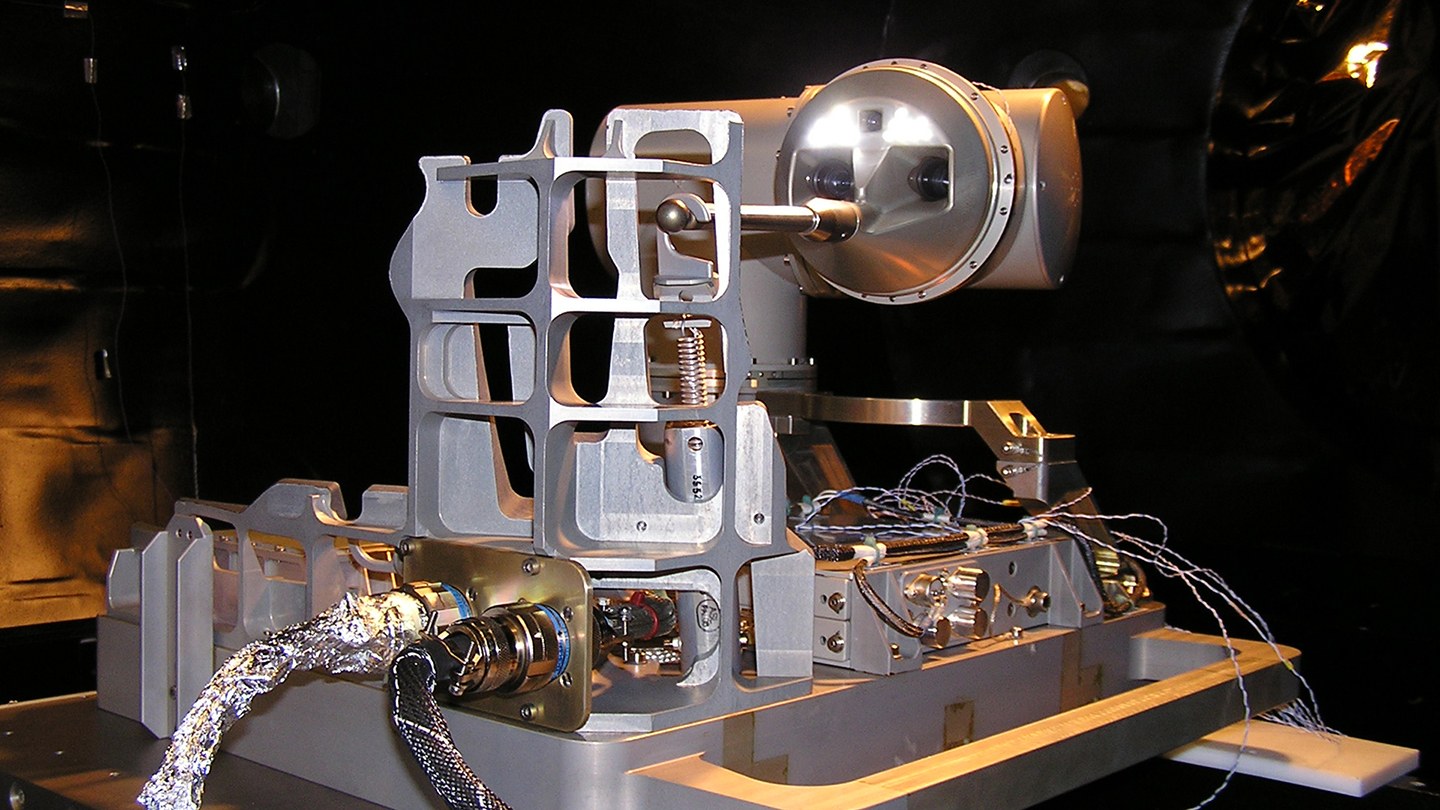
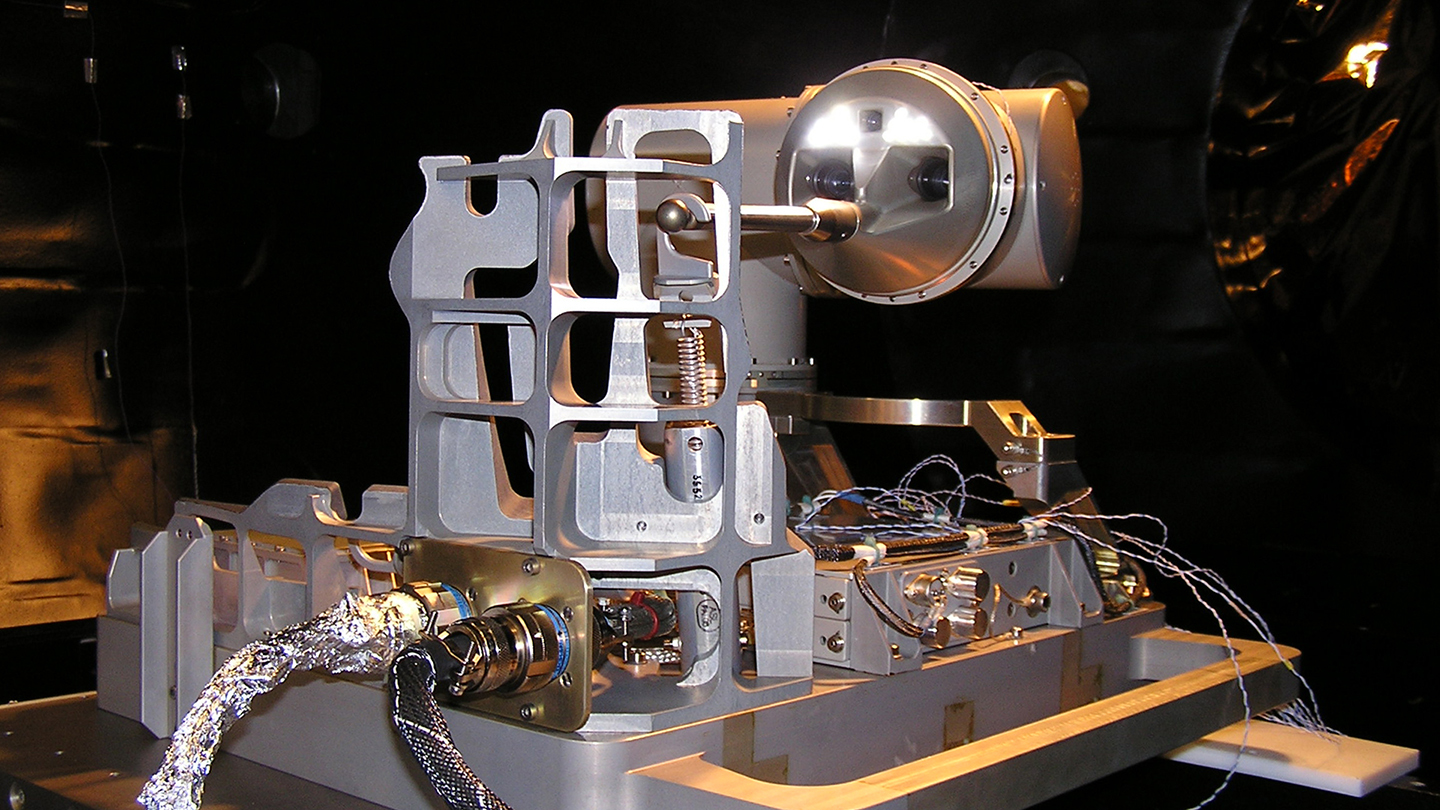
Prinzipiell setzt sich das System aus einem Roboterarm mit zwei Gelenken, einem "Metallfinger" an der Spitze des Arms und einer Stereo-Videokamera sowie einer Mono-Kamera zusammen. Diese Elemente sind auf einer Basisplattform außen am russischen Service-Modul (SM) der ISS montiert. Des Weiteren befinden sich auf der Basisplatte Elektronikboxen für die Stromverteilung und Bildverarbeitung sowie eine spezielle Experimentkontur, die für dynamische Bewegungsexperimente des Roboters sowie für Versuche zur Gelenkparameterbestimmung dient. Die Robotergelenke und die Kameras werden von einem zentralen Experimentcomputer innerhalb der ISS gesteuert.
Steuerung von der Erde im Tele-Präsenz-Modus
Während des nicht-automatischen Betriebes, dem so genannten Tele-Präsenz-Modus, wird das Experiment durch einen Operator am Boden geführt. Das ist immer dann möglich, wenn die ISS das Sende- und Blickfeld der Bodenstation in Weilheim südwestlich von München durchfliegt. Dabei wird die Bord-Boden-Bord-Kommunikation durch einen ROKVISS-eigenen hochratigen S-Band-Link sichergestellt. Von Bord der ISS werden die Bilder der Stereokamera auf den Bildschirm des Operators übertragen, gleichzeitig erfolgt auch die Übertragung der am Roboter auftretenden Kräfte und der Gelenkpositionen. Die Kräfte werden an dem vom Operator genutzten Joystick spür- und fühlbar gemacht. Die Monokamera, die am Kopf des Roboterarms befestigt ist, kann den Zustand der ISS im nahen Umfeld überprüfen und Aufnahmen von der Erde machen.
Der Tele-Präsenz-Modus ist nur während der Phase der direkten Funkverbindung zwischen Boden und Raumstation möglich. Die an den Gelenken von Sensoren gemessenen Kräfte werden direkt auf den Joystick des Operators übertragen. Dieser Modus erfordert einen anspruchsvollen up-and-down-link für die Robotik- und Videodaten. Die maximale Zeitverzögerung der gesamten Datenübertragung ist nicht größer als etwa 10 Millisekunden.
Der automatische Modus wird in der Phase genutzt, in der es keine Funkverbindung von Bord zum Boden gibt. Hierbei werden die Experimente vom Experimentcomputer an Bord der ISS gesteuert und die Experimentdaten zur späteren Auswertung gespeichert.
ROKVISS - Weltraumkompetenz aus Deutschland
Finanziert wird das Projekt vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF). Die Hard- und Software wurde entwickelt und gebaut von EADS Space Transportation in Bremen als Hauptauftragnehmer und dem DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen, das für die Robotik-Komponenten und die Experimentdurchführung sowie die wissenschaftliche Auswertung der Ergebnisse verantwortlich zeichnet. Die Firma Kayser-Threde aus München ist für Entwicklung und Bau des Experimentcomputers, die Stromversorgung und technische Unterstützung des DLR-Instituts zuständig. Das Unternehmen Hoerner & Sulger liefert die Kameraausrüstung mit Elektronikzubehör. Das Management des Projekts erfolgt durch die Raumfahrt-Agentur des DLR in Bonn. Die Durchführung der Mission basiert auf einer Vereinbarung zwischen der Raumfahrt-Agentur des DLR, den russischen Partnern der Roskosmos und RKK Energija sowie dem Münchner Unternehmen Kayser-Threde als Hauptauftragnehmer für die S-Band-Kommunikationsinfrastruktur.
ROKVISS - Das anspruchsvolle Weltraum-Experiment
Roboteranwendungen in der Raumfahrt verlangen aus Kosten- und Sicherheitsgründen den Einsatz von Leichtbauelementen, die einen hohen Grad an Mobilität und Interaktivität ermöglichen müssen. Das Verhältnis der durch den Roboter zu bewegenden Last und dem eigenen Gewicht sollte möglichst 1:1 betragen. Das vom DLR entwickelte neue Roboterkonzept ist als modulares System, bestehend aus den Basiselementen, den intelligenten Gelenkantrieben und der Elektronik ausgelegt. Das Ziel des Experimentes ist die Überprüfung und der Test von hoch integrierten Leichtbau-Robotikelementen unter den realen Bedingungen des freien Weltraums. Hinzu kommen neue Steuerungsverfahren für den automatischen Betrieb und die Online-Kontrolle durch einen Operator. Die Entwicklung dieses Systems basiert auf bereits terrestrisch eingesetzten Robotikkomponenten.
ROKVISS - Das komplexe Gesamtsystem
Das ROKVISS-System setzt sich aus mehreren Hauptkomponenten zusammen:
Externe Flugeinheit
Die Basisplattform wird außen an der ISS, am russischen Servicemodul (SM) auf dem so genannten universellen Arbeitsplatz angebracht. Die Installation erfolgt während eines Außenbordeinsatzes durch die Kosmonauten. Auf der Plattform ist der Roboterarm mit seinen zwei hoch integrierten Gelenken montiert, an dessen Ende befinden sich die Kamerasysteme. Die Stereokamera überträgt den Experimentverlauf, die Monokamera dient zur Distanzbeobachtung. Zusätzlich sind auf der Plattform weitere Elektronikeinheiten - Stromverteilung und Bildverarbeitung - angeordnet.
Hinzu kommt die S-Band-Kommunikationseinheit mit Antenne, Telemetrie- und Telekommando-Box als Sende- und Empfangsstation der Daten zur Steuerung des Experimentes. Auftragnehmer für diese Einheit ist die Firma Kayser-Threde. Die ebenfalls auf der Plattform angebrachte Kontur dient der Durchführung der Experimente - Abfahren von Bahnen, Kontaktoperationen - im Automatik- und Tele-Präsenz-Modus.
Interne Flugeinheit
Der ROKVISS-Onboard-Computer kontrolliert alle Elemente der externen Flugeinheit und somit alle vom Roboter ausgeführten Operationen. Gleichzeitig stellt er die Verbindung zum russischen Kontrollsystem und zur ROKVISS S-Band-Kommunikationseinheit her.
Bodensegment
Die Steuerung und Überwachung des Flugsystems erfolgt über die Sende- und Empfangsstation des DLR Raumfahrt-Kontrollzentrums im süddeutschen Weilheim. Die ROKVISS-Bodenkontrolleinheit ist ebenfalls dort untergebracht. Diese besteht aus einem Joystick mit Kraftrückmeldung, den Computern zur Bahngenerierung und Bildverarbeitung sowie einer 3D-Bildprojektionseinheit auf Virtual-Reality-Basis.
ROKVISS - Hohe Flexibilität durch unterschiedliche Betriebsarten
Tele-Präsenz-Modus
Für die Reparatur von Satelliten und andere Serviceaufgaben im Weltall ist die direkte Einbeziehung eines Operators in den Regelkreis unerlässlich. Grundlage dafür ist ein schneller Datenkreislauf. Während der direkten Datenverbindung Bord-Boden ist es möglich, das Robotikexperiment direkt vom Boden aus zu steuern. Dieser Modus erfordert einen so genannten deterministischen, sehr schnellen up-and-down-Link zwischen der ISS und dem Bodenkontrollzentrum zur Übertragung von Steuer- und Videosignalen. Dabei sollte die Signallaufzeit (physikalische Laufzeit und Zeit zur Verarbeitung der Daten) auf ein Minimum reduziert werden, das heißt der Betrieb erfolgt in Echtzeit. Während dieses Betriebes gibt es eine direkte Kraftrückkopplung Bord-Boden. Gemeinsam mit den von der Station übertragenen Stereo-Video-Bildern vermitteln die Daten dem Operator einen reellen Eindruck von den Abläufen am Robotiksystem auf der ISS.
Automatikmode
Hierbei wird der Roboter automatisch vom Experimentcomputer gesteuert. Die Daten für den automatischen Betrieb werden on-board gespeichert und nach Abschluss des Experimentes zur Auswertung an die Bodenstation übertragen. Dies erfolgt während des nächsten, auf das Experiment folgenden Funkkontaktes.
Ausblick – Wie geht es nach ROKVISS mit der Weltraum-Robotik weiter?
Das Hauptziel der Entwicklung und des Experimentes ist der Entwurf neuer komplexer Roboter für den Einsatz von Servicerobotern im freien Weltraum. Ein erstes Anwendungsfeld ist die Mission TECSAS (TEChnology SAtellite for the demonstration and verification of Space systems). Nach Abschluss einer Machbarkeitsuntersuchung wurde im Oktober 2004 mit der Definitionsphase für dieses Projekt begonnen. Das Vorhaben wird in Kooperation mit der russischen Raumfahrtagentur, dem russischen Unternehmen Babakin Space Research Center in Moskau, deutschen Unternehmen und Instituten sowie der kanadischen Raumfahrtagentur (CSA) durchgeführt.