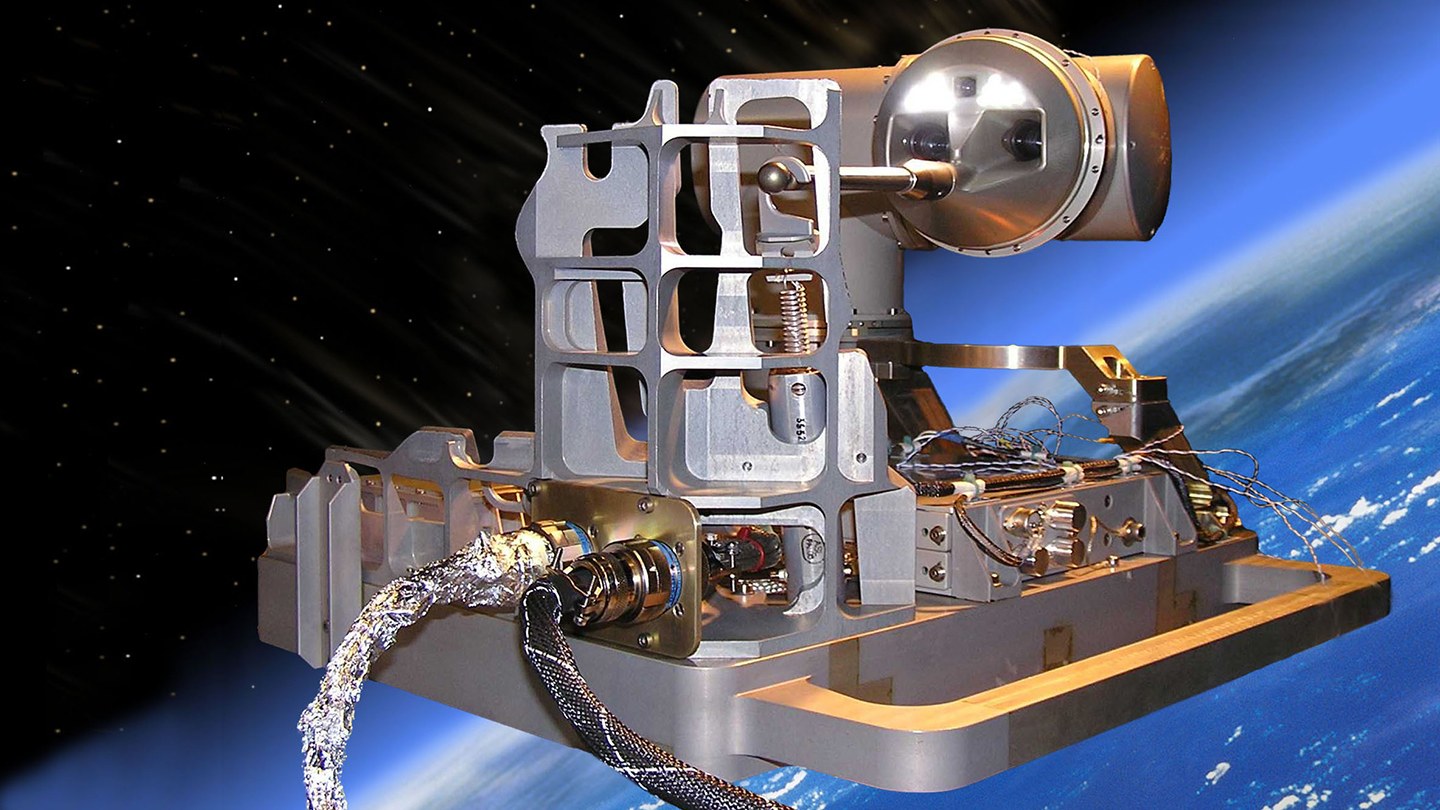
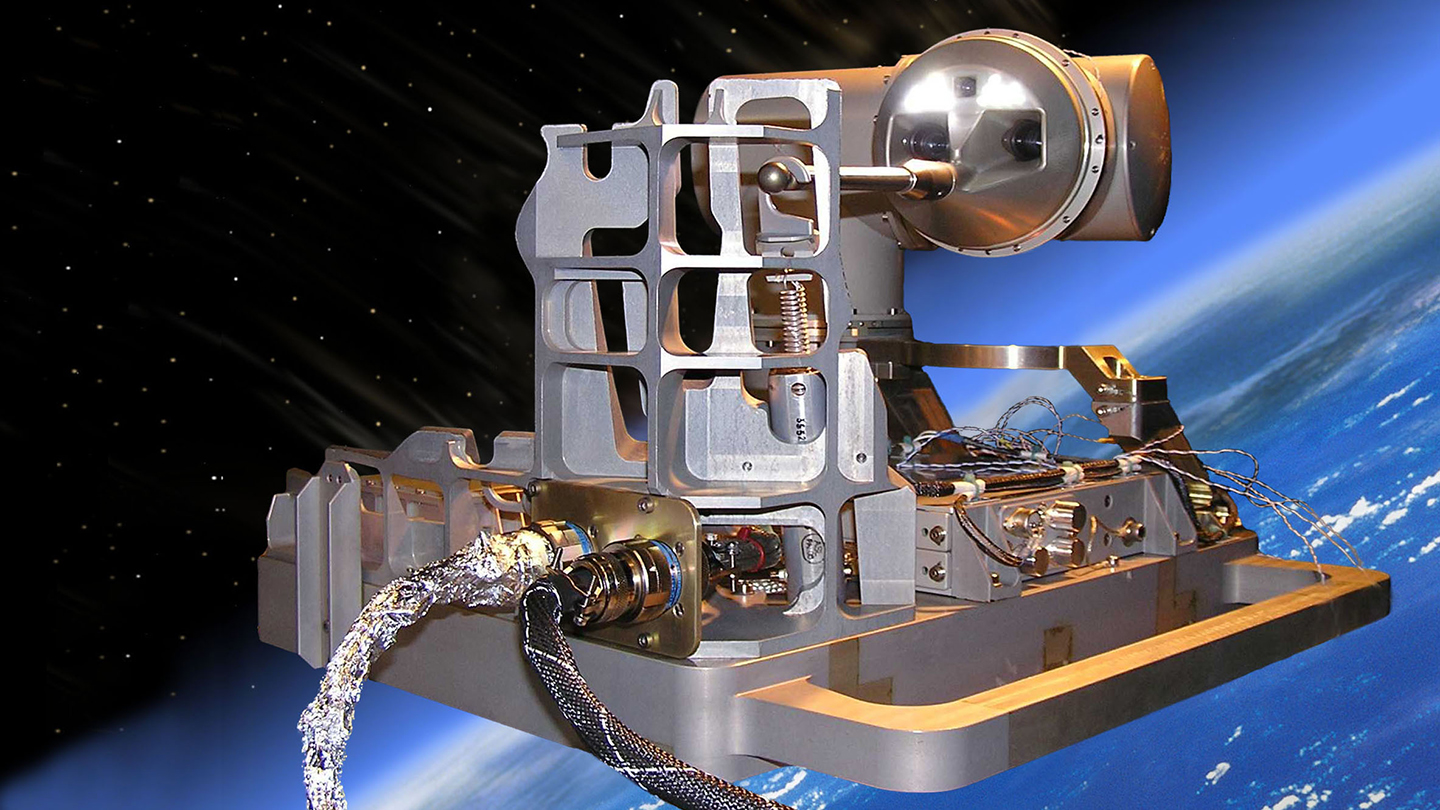
Köln/Baikonur – Für die deutsche Weltraum-Robotik beginnt mit dem erfolgreichen Start des russischen Raumschiffs Progress M51 eine wichtige und lang ersehnte Bewährungsprobe. Gestartet war die Sojus-U-Rakete mit dem Progress-Raumschiff am 24. Dezember 2004 um 03.20 Uhr Ortszeit (23. Dezember 2004, 23.20 Uhr MEZ) vom Startplatz Nr. 5 des russischen Weltraumbahnhofs Baikonur. Mit an Bord war das Technologieexperiment ROKVISS (Robotik-Komponenten-Verifikation auf der ISS) – ein rund 50 Zentimeter großer Roboterarm mit zwei Gelenken, einem Metallfinger und zwei integrierten Kameras.
Anfang Dezember 2004 hatte der deutsche Roboterarm in Baikonur alle abschließenden Tests erfolgreich absolviert. Ende Januar 2005 soll er an einer Außenplattform der Internationalen Raumstation ISS montiert werden und dort seine Weltraumtauglichkeit beweisen. Im März 2005 beginnen die Experimente, die vom DLR in Oberpfaffenhofen betreut und ausgewertet werden.
Wichtiges Projekt für deutsche Raumfahrt-Industrie und -Forschung
Finanziert wird das Projekt vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF). Die Hard- und Software wurde entwickelt und gebaut von EADS Space Transportation in Bremen als Hauptauftragnehmer und dem DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen, das für die Robotik-Komponenten und die Experimentdurchführung sowie die wissenschaftliche Auswertung der Ergebnisse verantwortlich zeichnet. Die Firma Kayser-Threde aus München ist für Entwicklung und Bau des Experimentcomputers, die Stromversorgung und technische Unterstützung des DLR-Instituts zuständig. Das Unternehmen Hoerner & Sulger liefert die Kameraausrüstung mit Elektronikzubehör. Das Management des Projekts erfolgt durch die Raumfahrt-Agentur des DLR in Bonn. Die Durchführung der Mission basiert auf einer Vereinbarung zwischen der Raumfahrt-Agentur des DLR, den russischen Partnern der Roskosmos und RKK Energija sowie dem Münchner Unternehmen Kayser-Threde als Hauptauftragnehmer für die S-Band-Kommunikationsinfrastruktur.
Die Kosten für das Experiment ROKVISS belaufen sich auf 11,5 Millionen Euro einschließlich 3,5 Millionen Euro für Start, Montage und Betrieb auf der ISS, die Deutschland an die russischen Vertragspartner zahlt.



{kind=link}
{kind=link}