Erklärbarkeit in der Robotik: die "Green Button Challenge"
Wie viel wissen die Roboter am DLR-Institut für Robotik und Mechatronik darüber, was sie tun und warum? Um das herauszufinden, hat die Abteilung Kognitive Robotik die "Green Button Challenge" ins Leben gerufen.
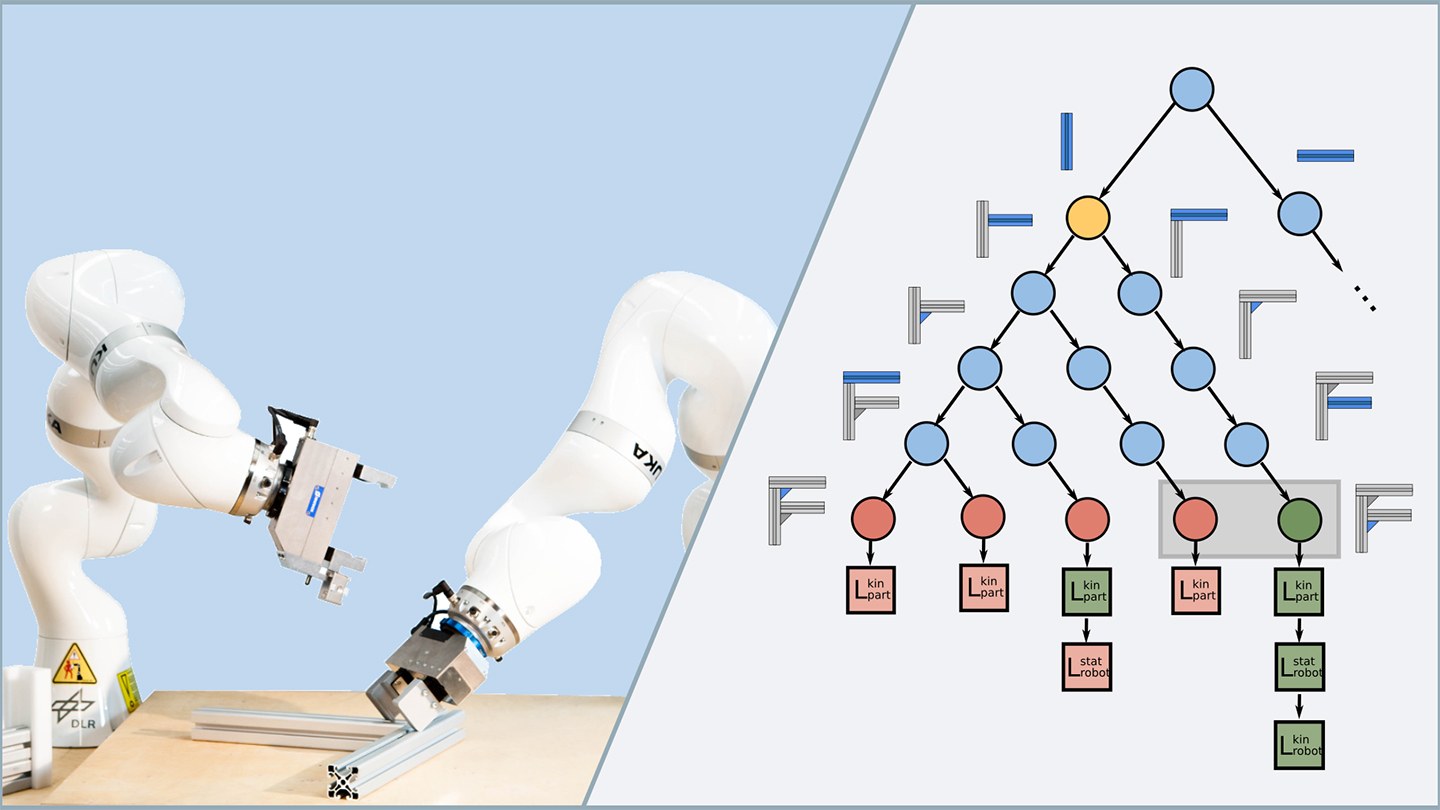
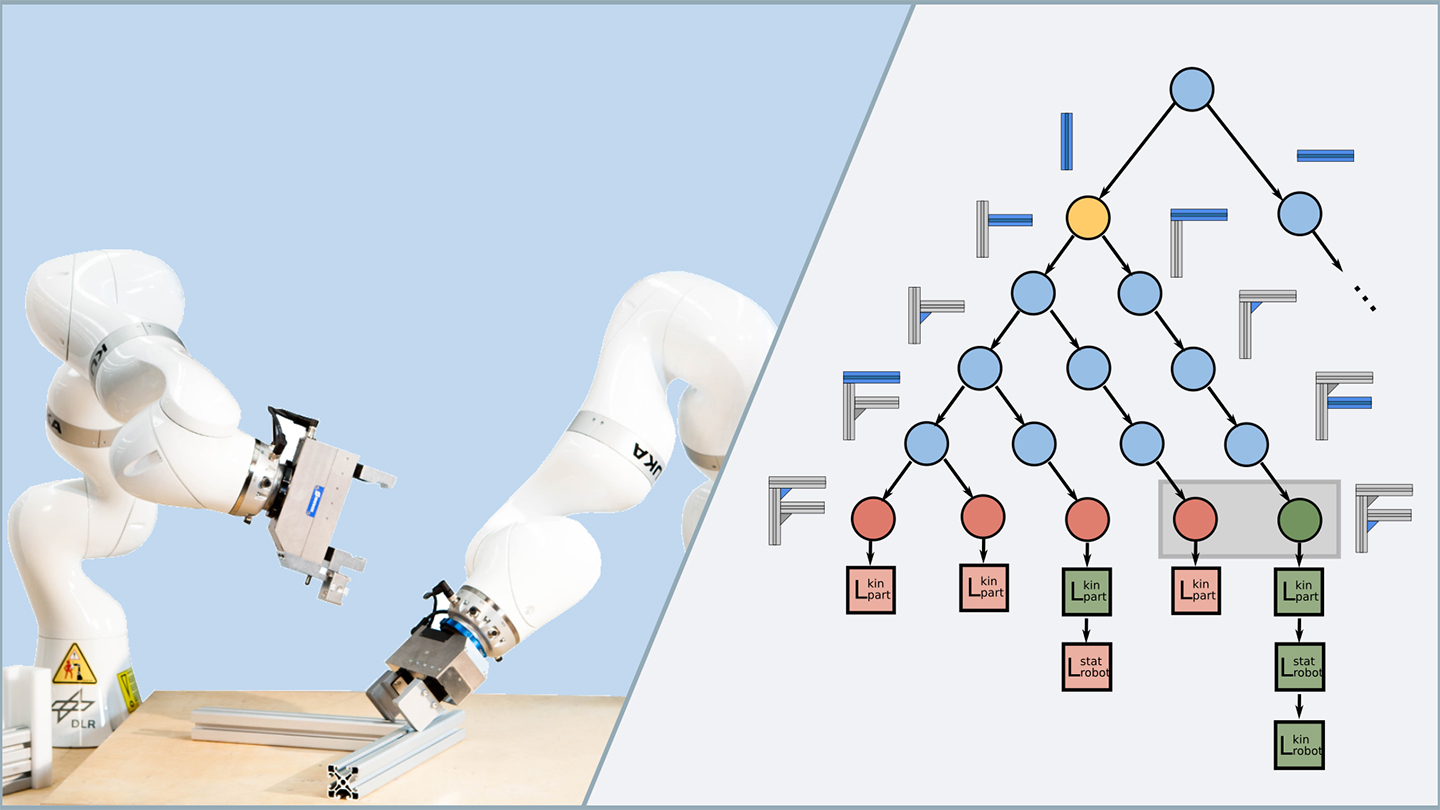
Planung von Aufgaben für die autonome Montage eines kundenspezifischen Produkts
Bis zu welchem Punkt sind Roboter in der Lage, über ihr eigenes Scheitern Rückschlüsse zu ziehen? Im Umfeld der Factory of the Future werden Ideen zur autonomen Montageplanung entwickelt, um diese Frage zu beantworten. Es werden Pläne für Roboter mit modularen und adaptiven Fähigkeiten generiert, um eine Reihe von kundenspezifischen Produkten zu bauen. Eine semantische Repräsentation von Plänen und Fehlern erlaubt es dem System, das gewonnene Wissen zwischen verschiedenen Produkten zu übertragen. Die Wiederverwendung dieses Wissens führt dadurch zu einer Reduzierung des Planungsaufwandes.
Übertragbares und erklärbares Wissen ist eine Fachgruppe in der Abteilung Kognitive Robotik.
Verschiedene Anwendungsbereiche der Robotik setzen unterschiedliche Autonomiestufen voraus, von direkter Kontrolle wie Telepräsenz im chirurgischen Kontext über gemeinsame Kontrolle (Shared Control) in der Assistenzrobotik bis hin zu höheren Autonomieformen in der planetaren Exploration und der Produktion. Um höhere Autonomiestufen vor allem in unstrukturierten Umgebungen zu erreichen, ist es notwendig, dass der Roboter auf Wissen darüber, was er tut und wieso er es tut, zurückgreifen kann. Laut unserer Annahme kann er nur dann adaptives, zielgerichtetes Verhalten an den Tag legen. Das Hauptziel der Gruppe „Transferable Explainable Knowledge“ (übertragbares, erklärbares Wissen) ist deshalb den Robotern erklärbares Wissen über ihre Umgebung und Fertigkeiten zur Verfügung zu stellen.
Ein wichtiger Schritt um dieses Ziel zu erreichen ist die Entwicklung von Fertigkeitsrepräsentationen, die ein robustes, zielgerichtetes Verhalten erlauben. Zusätzlich sollten diese die Übertragung von Fertigkeiten zwischen verschiedenen Robotern, Aufgaben und Objekten erleichtern. Unser Ansatz setzt voraus, diese Fertigkeiten auf verschiedenen Abstraktionsebenen abzubilden. Abstrakte Ebenen wurden in Sprachen wie PDDL (Planning Domain Description Language) implementiert, die unter anderem in Action Templates verwendet werden, oder als graphische Zustandsmaschine wie RAFCON umgesetzt. Im Gegensatz dazu wird prozedurales Wissen erlernt oder intuitiv programmiert, wie in der Fachgruppe Interaktives Lernen von Fertigkeiten erforscht wird.
Zudem erforscht die Gruppe Übertragbares und erklärbares Wissen wie Wissen über den Zustand der (Um-)Welt kompakt dargestellt werden kann. Diese Weltmodellrepräsentation verbindet verschiedene Abstraktionsebenen (sensorische Messreihen, Zustandsvariablen, symbolisches Wissen) miteinander, um die Übertragung solchen Wissens zwischen den Robotern zu vereinfachen. Eine besonders interessante Fragestellung für uns ist, wie dieses Weltmodell mit der Zeit iterativ verfeinert werden kann, weil der Roboter immer komplexere und vielseitigere Aufgaben lösen soll.
Ein wichtiger Vorteil der expliziten Wissensrepräsentation ist, dass das Wissen erklärbar wird. Darunter verstehen wir, dass es interpretiert werden kann und von Menschen verstanden wird. Als Beispiel hierfür dient unsere "Green Button Challenge", wo einige Roboter in der Lage waren zu erklären, was sie gerade tun und wieso.


{kind=link}
{kind=link}