Klassische Industrieroboter werden oft noch über textuelle Sprachen programmiert. Dies erfordert Experten und dauert lannge, weswegen die dadurch entstehenden hohen Kosten sich nur bei hohen Stückzahlen lohnen. Um die automatisierung voranzutreiben, ist es daher sinnvoll, die Programmierung von Robotern so weit zu vereinfachen, dass auch Laien in der Lage sind, Roboter zu programmieren. Auch die Programmierdauer soll hierbei signifikant reduziert werden.
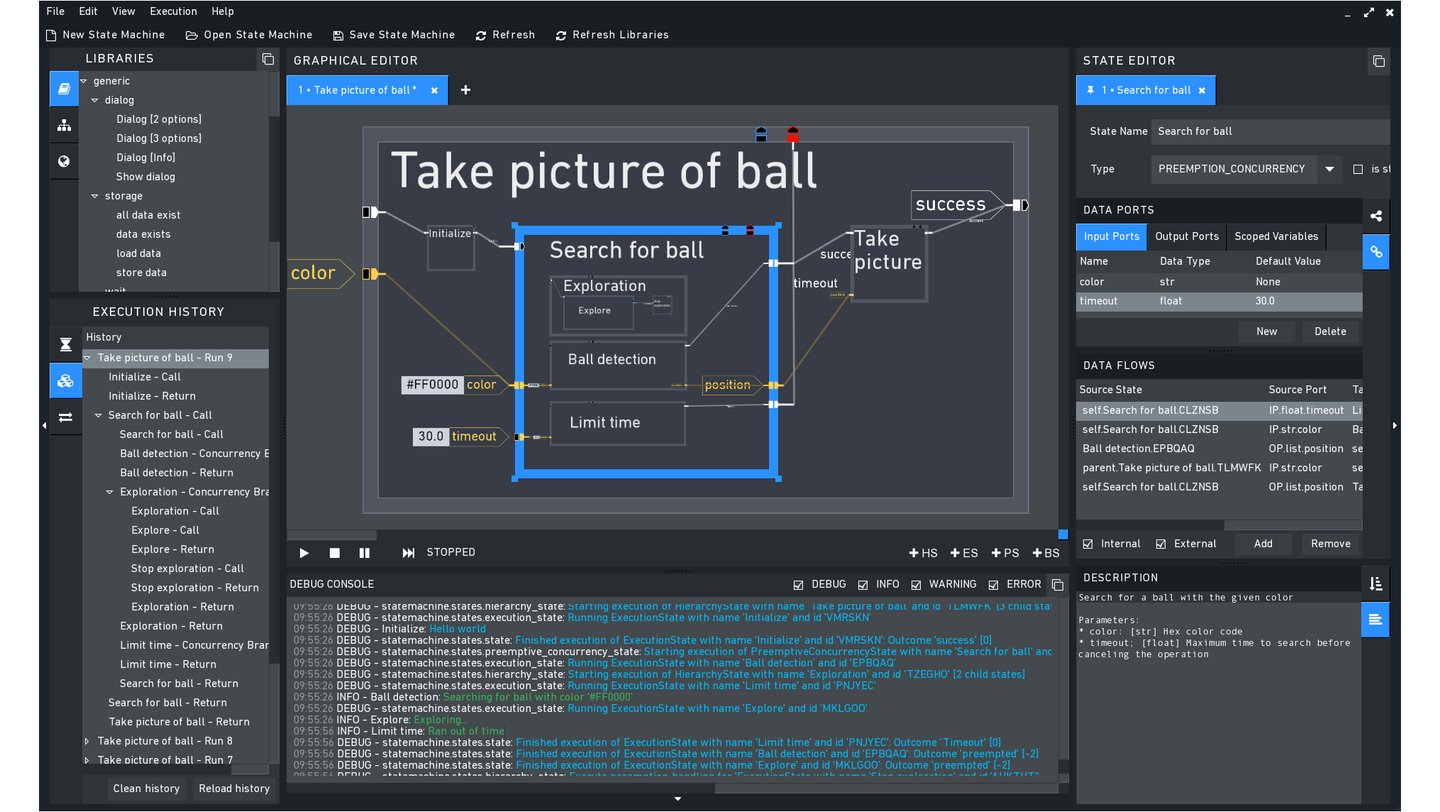
Screenshot einer beispielhaften RAFCON-Zustandsmaschine
RAFCON ist ein Werkzeug, mit dem hierarchisch aufgebaute Zustandsmaschinen visuell programmiert werden können. Es ist konzipiert für die Koordinierung von Abläufen komplexer Robotersysteme, wie z. B. der Missionssteuerung. Die funktionsreiche GUI und ausgereifte Debugwerkzeuge erlauben eine schnelle und intuitive Entwicklung von Abläufen.
Hierzu werden neue Programmierkonzepte entwickelt, die einen hohen Grad an Gebrauchstauglichkeit aufweisen. Das heißt, dass ergonomische Gesichtspunkte wie Intuitivität von Anfang an Berücksichtigung finden. Diese Konzepte, die sowohl für Laien, als auch für Experten entwickelt werden, werden mit Benutzerstudien evaluiert und kontinuierlich verbessert.
Ein Beispiel für ein Softwaretool, das Experten bei der Programmierung von autonomen Roboterprogrammen und Roboterfähigkeiten (skills) unterstützt, ist RAFCON. Der Programmablauf wird hier über hierarchische Zustandsmaschinen (state machines) beschrieben. Hierbei werden auch Datenflüsse modelliert und es können parallele Abläufe definiert werden. Hervorzuheben ist dabei der grafische Editor, der sie wie eine digitale Karte bedienen lässt, in die man hinein- und herauszoomen, sowie den Ausschnitt verschieben kann.
Ein Beispiel für ein Programmierkonzept für Laien nennt sich "Task-Level Programming by Demonstration" (TLPbD). Die Kernidee hierbei ist, dass der Mensch dem Roboter eine Aufgabe durch führen und vormachen zeigt und das System automatisch erkennt, welche Roboterfähigkeiten mit welchen Parametern nötig sind, um die Aufgabe nachzumachen. Das System erkennt also die Intention des Menschen und kann diese mit den passenden Fähigkeiten des Roboters erreichen.



{kind=link}