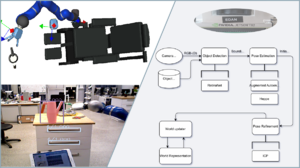
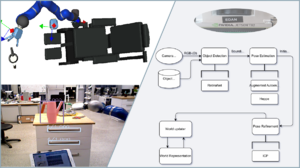
Damit ein Assitenzroboter wie EDAN Unterstützung in der Ausführung von Alltagsaktivitäten bieten kann, wird eine genaue und zuverlässige Wahrnehmung der Umgebung benötigt. Durch die Erkennung und Lokalisierung von Objekten kann der Roboter situationsgerecht die richtigen teilautonomen oder autonomen Fähigkeiten anbieten und die Nutzenden somit gezielt unterstützen. Am Robotersystem EDAN verwenden wir eine kombinierte Farb- und Tiefenkamera, um die Umgebung zu erfassen. Ein auf deep-learning basierter Objekterkenner detektiert zunächst alle relevanten Gegenstände in der Umgebung des Roboters. Anschließend wir die Lage des Objekts mittels eines speziell antrainierten Autoencoders ermittelt und durch einen Modellbasierten Ansatz verfeinert. Die Objekte mit denen EDAN interagieren kann sind in einer Datenbank gespeichert, welche wir kontinuierlich erweitern.


{kind=link}