
DLR/HIT Hand


Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) entwickelte in Zusammenarbeit mit dem Harbin Institute of Technology (HIT) auf Basis der DLR Hand II eine multisensorielle Roboterhand. Diese Hand, die von der Firma Schunk unter der Bezeichnung „SAH“ vertrieben wird, zeigt, dass es heute möglich ist, hochentwickelte Mechatronik auch in Anwendungen im mittleren Preissegment zu integrieren.
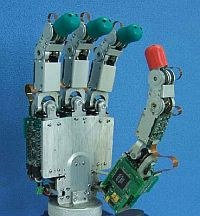
Die Roboterhand besteht aus vier identischen Fingern, von denen einer, der gegenüberliegende Daumen, mit einem zusätzlichen Antrieb ausgestattet ist. In Anlehnung an die motorischen Funktionen der menschlichen Hand besteht jeder Finger aus vier Gelenken. Zur Orientierung für die Steuerung liefern Sensoren an den Fingern für jedes Gelenk unter anderem Kraft- und Lagedaten. Die perfekte Integration aller Antriebe einschließlich der Elektronik in den Fingern und der Handfläche ermöglicht den Anbau an jeden beliebigen Roboterarm.
Design
Technik allein macht noch keine Hand. Für den Einsatz im Alltag muss auch die äußere Hülle besonderen Anforderungen genügen. Sie muss nicht nur Schutzabdeckung für die Kabel und rutschsichere Greiffläche sein, sondern auch durch eine ansprechende Optik möglichen Berührungsängsten vorbeugen.
Die DLR/HIT Hand hat den renommierten iF Design Award 2007 in der Kategorie 07. Industrie & Gebäude gewonnen. Die Jury kommentierte die Entscheidung wie folgt: „Auf dem Handrücken sind die Strecksehnen angedeutet, die Handinnenfläche zeigt eine Lebenslinie und die Fingerkuppen lassen Fingernägel erahnen. Die gesamte Hand hat dadurch ein sehr menschliches und natürliches Erscheinungsbild, sodass sie bei menschlichen Anwendungen eine hohe Akzeptanz erreicht.“ (PDF)
Technologie
Die Hand besitzt vier Finger mit je vier Gelenken und drei Aktuatoren. Der Daumen verfügt über einen zusätzlichen Freiheitsgrad für feinmotorische Bewegungen und kraftvolles Greifen. Bei den Aktuatoren handelt es sich um handelsübliche bürstenlose Gleichstrommotoren mit analogen Hall-Sensoren. Alle Motoren sind in die Finger bzw. in die Handfläche integriert. Jedes Gelenk ist mit einem berührungslosen magnetischen Winkelsensor und einem Drehmomentsensor auf DMS-Basis ausgestattet. Der echtzeitfähige, serielle Hochgeschwindigkeits-Kommunikationsbus (25 Mbit/s) wurde unter Verwendung von FPGAs (Field Programmable Gate Arrays) implementiert. Für die serielle Kommunikation zwischen der Hand und dem Prozessor werden insgesamt nur drei Leitungen benötigt. Die Hand wird von einem einzigen digitalen Signalprozessor gesteuert, der in eine PCI-Karte für einen handelsüblichen PC integriert ist. Vom PC aus kann die Hand einfach über eine benutzerfreundliche Oberfläche gesteuert werden, gleichzeitig werden alle Sensordaten auf dem Bildschirm angezeigt. Die DLR-Hand gilt weltweit als technologisch führend. Durch den Einsatz handelsüblicher bürstenloser Gleichstrommotoren wurde die DLR/HIT Hand als seriennahe Version der DLR Hand II konzipiert. Sie bietet eine vielversprechende Basis für eine künftige Serie komplexer multisensorieller Roboterhände.
Downloads
Links
Downloads
- DLR-HIT data & spec sheet (3.1 MB)
- SAH data sheet (665.3 KB)
- iF design award (32.9 KB)