
3D-Modellierer 1 (2001)
Gehäuseauslegung
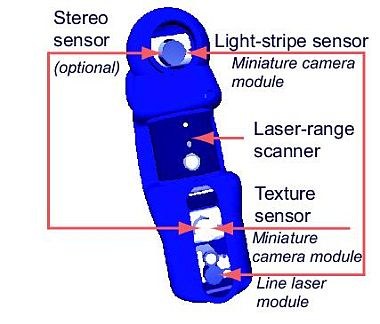
Derzeit beherbergt das Gehäuse des Multisensory 3D-Modeller den Laser Range Scanner, einen Textursensor (kalibrierte CCD-Miniaturkopfkamera), einen Laserstreifensensor, der eine weitere Kamera im Verbund mit einem Zeilenlasermodul (Öffnungswinkel 60°, Wellenlänge 635 nm) nutzt, und einen Stereo-Sichtsensor.
Diese unterschiedlichen Sensoren sind in einem speziell entwickelten Gehäuse untergebracht, das leicht und gut handhabbar ist.

Die 6D-Pose (Position und Orientierung) des Gehäuses wird von einem externen System erfasst. Daher können alle Sensoren in Bezug zum selben globalen Rahmen kalibriert werden. Das wiederum ermöglicht den Vergleich und die Zusammenführung der Daten der verschiedenen Sensoren. Über einen „Wandler“-PC werden die Pose-Abfragen vom CAN-Bus sowie die 6D-Posedaten des Verfolgungssystems gelesen und letztere zurück an den CAN-Bus gesendet. Dies ist erforderlich, weil jedes Verfolgungssystem eine andere Schnittstelle aufweist. Es sind zwei unterschiedliche Geräte für die Posemessung realisiert. Im Folgenden werden sie detailliert erklärt.
Lagemessung
Der FARO-Arm

Das Gerät von FARO ist ein passiver Manipulator mit 7 Freiheitsgraden. Normalerweise wird es für die tastende Messung von Gegenständen eingesetzt, d. h. eine am TCP montierte Tastspitze fährt die Oberfläche des Objekts ab.
In unserer Anwendung wird anstatt der Tastspitze der Scanner am Arm befestigt. Die Posedaten können über eine serielle Datenverbindung vom Arm gelesen werden. Der Vorteil des Arms ist seine hohe Messgenauigkeit von ca. 0,1 mm. Leider bietet das System nur einen kleinen Arbeitsraum und ist wegen des hohen Armgewichts nur bedingt mobil.
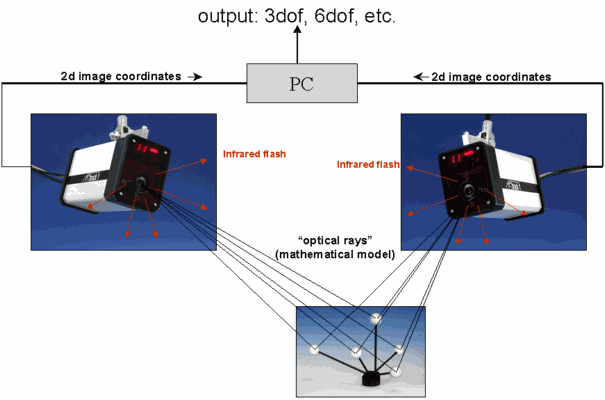
ART IR-Optisches Verfolgungssystem
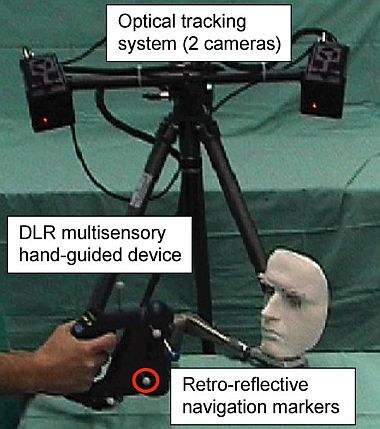
Der smARTtrack1 ist ein echtzeitfähiges IR-optisches Ortungssystem. Es besteht aus einem Stereokamerasystem und ist über Ethernet mit einem PC verbunden. Das System kann spezielle, das infrarote Licht retroreflektierende Marker verfolgen und deren 3D-Positionen bestimmen. Es ist ebenfalls in der Lage, starre Markeranordnungen zu verfolgen und 6D-Posen zu berechnen. Die Taktzeit des Systems ist bis zu einem Höchstwert von 20 ms einstellbar. In der Scanner-Anwendung sind die Marker auf dem Gehäuse angebracht.
Trotz des FARO-Arms hat dieses System einen größeren Arbeitsraum und der Scanner ist sehr leicht und einfacher in der Handhabung. Allerdings ist das System weniger genau (< 1 mm), weshalb die vermessenen Modelle weniger präzise und detailliert sind.
{kind=link}