Wir veröffentlichen einen Datensatz, der in der mondähnlichen Umgebung des Ätna auf Sizilien mit einem Sensor-Setup aufgenommen wurde, das eine Stereokamera, ein LiDAR und eine IMU umfasst. Der Datensatz soll mehrere Faktoren aufzeigen, die eine Herausforderung für visuelle und LiDAR-basierte Lokalisierungs- und Kartierungspipelines darstellen, wenn sie in stark unstrukturierten Umgebungen arbeiten. Die schwierigen Beleuchtungsbedingungen in Verbindung mit extremen visuellen Aliasing-Effekten sowie das Fehlen markanter Strukturen schränken die Möglichkeit ein, eine Ortserkennung mit herkömmlichen Ansätzen durchzuführen. Darüber hinaus basiert der in diesem Datensatz verwendete LiDAR-Sensor auf neuartigen Festkörpertechnologien, die vielversprechende Eigenschaften für den Einsatz in Raumfahrtanwendungen aufweisen. Das schmale Sichtfeld (~70H x 30V) des LiDAR-Sensors in Verbindung mit der Geometrie der Landschaft erlaubt es nicht, traditionelles LiDAR-SLAM zu implementieren, sodass die Verwendung des Sensors als Ergänzung zu den visuellen Daten untersucht werden muss. Dieser Datensatz bietet 7 Sequenzen mit besonderen Merkmalen in Bezug auf die Art der Trajektorien und die Art der Landschaft, mit genauer D-GNSS-Ground-Truth.
Die Sequenzen, Ground Truth und Konfigurationsdateien sind zugänglich unter:
Riccardo Giubilato, Wolfgang Stürzl, Armin Wedler, Rudolph Triebel (2022) Challenges of SLAM in Extremely Unstructured Environments: The DLR Planetary Stereo, Solid-State LiDAR, Inertial Dataset. IEEE Robotics and Automation Letters, 7 (4), pp. 8721-8728. IEEE - Institute of Electrical and Electronics Engineers. doi: 10.1109/LRA.2022.3188118. ISSN 2377-3766. [elib]
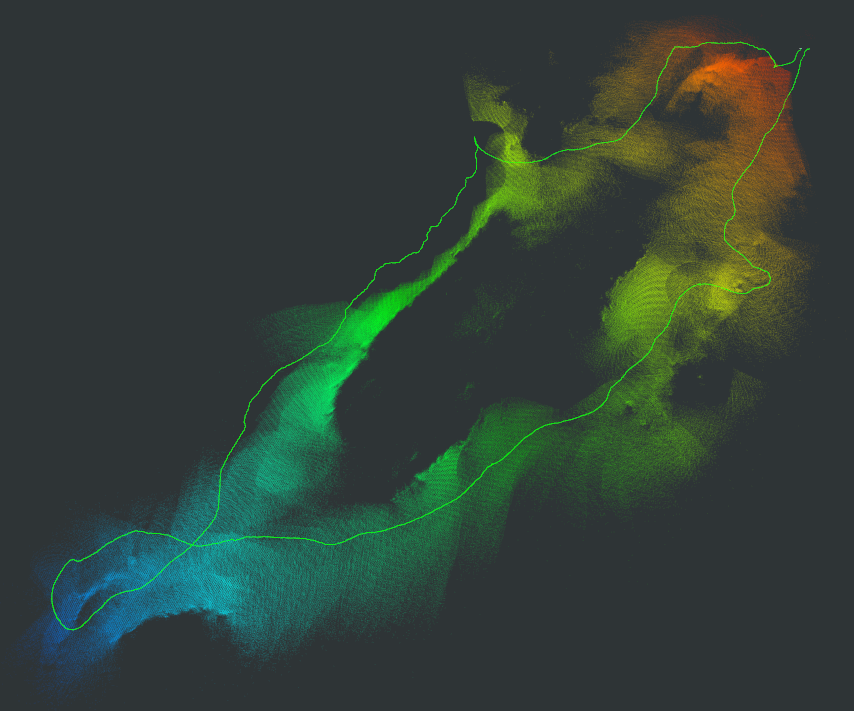
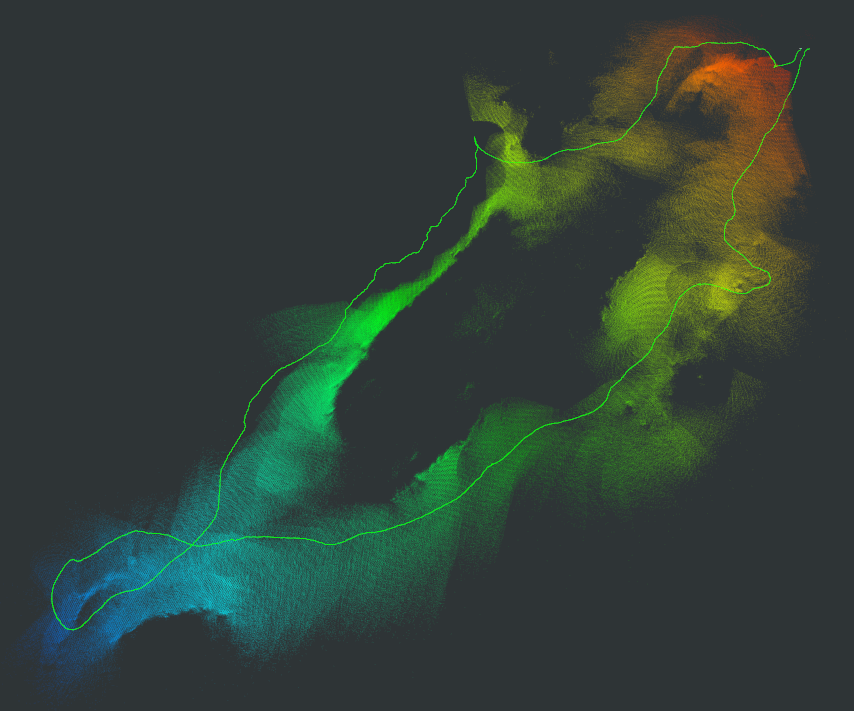
LiDAR Map
Karte, die durch das Stapeln von LiDAR-Scans bei gegebenen Posen der linken Kamera erstellt wurde, berechnet durch Visual-Inertial SLAM
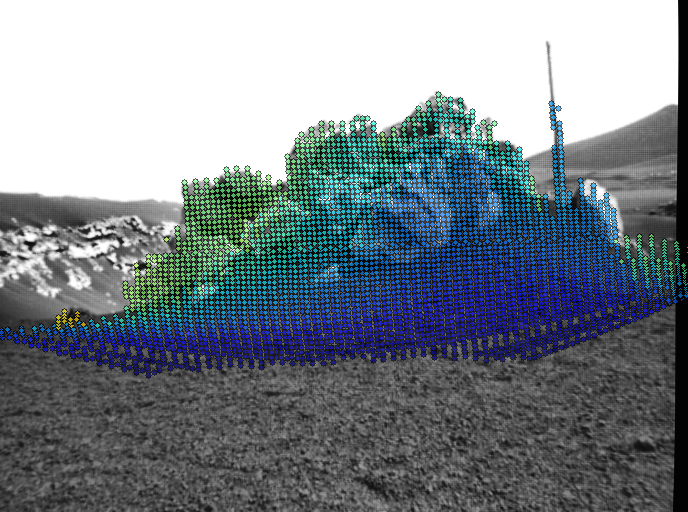
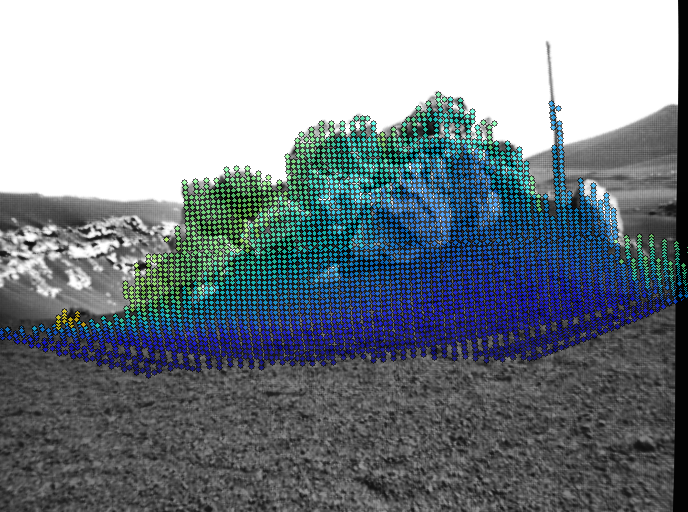
Darstellung des Stereo-Solid-State-LiDAR-Inertial sensoraufbaus, der 2 AVT-Monochromkameras in Stereokonfiguration, einen Blickfeld Cube-1 LiDAR und eine XSens IMU umfasst



{kind=link}
{kind=link}
{kind=link}