SMRS

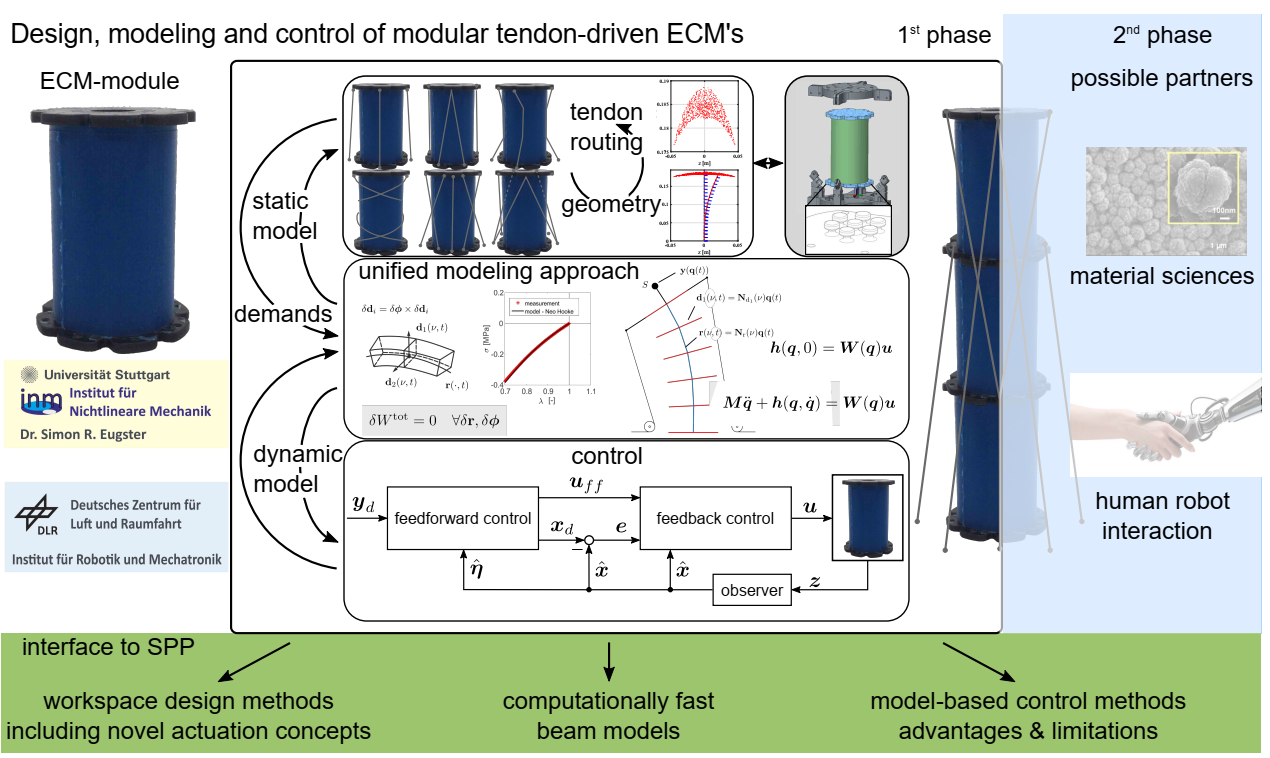
Ziel des Projekts ist es, modulare, sehnengetriebene Mechanismen aus weichen Materialien zu entwerfen, zu modellieren und zu steuern. Zunächst ist die mechanische Robustheit bemerkenswert, die sich vor allem in der Absorption äußerer Stöße äußert, ohne die Aktoren zu beschädigen. Um ECM's systematisch zu entwerfen, welche aus mehreren ECM-Modulen bestehen, ist eine einheitliche mechanische Theorie für verformbare und starre Körper erforderlich, um das mechanische Verhalten in solchen Robotersystemen aus weichen Materialien zu modellieren. Während es sicher ist, dass die Gestaltung des Arbeitsraums ein genaues Modell erfordert, zielt das Projekt auch darauf ab, Modelle zu finden, die rechnerisch so effizient sind, dass sie für modellbasierte Steuerungs Ansätze verwendet werden können.
Laufzeit | 2019-05-01 bis 2022-04-31 |
Projektpartner | • Universität Stuttgart (Simon Eugster, Jonas Harsch) |
Anwendungsfelder | • weiche Robotik |
Website | |
Förderung | Schwerpunktprogramm der DFG SPP2100 „Soft Material Robotic Systems“ (Fördernummer 405032572) |
Projektdetails
Das neu entstehende Gebiet der Soft Robotics befindet sich noch in einem frühen Stadium. Die meisten Roboter sind für eine Laborumgebung konzipiert und befinden sich in einer Phase, in der die Zuverlässigkeit mechanischer und elektronischer Geräte noch begrenzt ist und die Steuerungskonzepte noch in den Kinderschuhen stecken. Folglich gibt es nur wenige reale Anwendungen. Um einen Schritt auf reale Anwendungsszenarien zuzugehen, werden wir einen seriellen Manipulator aus weichem Material mit Sehnenantrieb entwickeln. Der Serienmanipulator soll aus gestapelten Gelenkmodulen der ersten Förderperiode bestehen. Dieser Manipulator wird als Technologiedemonstrator dienen, um die Grenzen dessen auszuloten, was mit weichem Material möglich ist. Mit Standardtests für Robotermanipulatoren wollen wir den Weichstoffmanipulator hinsichtlich Ganzkörperverformung, Geschicklichkeit, Präzision, Wiederholbarkeit, Geschwindigkeit und Robustheit gegen äußere Einwirkungen bewerten. Um die Funktionsintegration des weichen Materials zu erhöhen, untersuchen wir, wie Hohlräume eingebracht werden können, in denen die Betätigungssehnen frei laufen, ohne die Eigenschaften des Materials zu beeinträchtigen. Die Dimensionierung dieser Spanngliedkanäle, der Spannglieder sowie der elektromechanischen Aktoren hängt stark von den Möglichkeiten zur Beschreibung der Physik des Manipulators ab. Daher wird eine Simulationsumgebung für die Analyse des statischen und dynamischen Verhaltens von Weichstoffmanipulatoren aufgebaut. Die Simulationsumgebung zeichnet sich durch die Integration der Sehnenbetätigung sowie alternativer softroboterspezifischer Betätigungsprinzipien aus. Ziel ist es, dass der Endeffektor des Softmanipulators einer vordefinierten Trajektorie folgen kann. Für die beabsichtigten modellbasierten Kontrollstrategien ergeben sich drei Themen. Dabei handelt es sich um die Trajektoriengenerierung, die Steuerung der Trajektorienverfolgung und die Zustandsschätzung des Manipulators. Diese Themen stellen eine besondere Herausforderung dar, da entsprechende Methoden für starr gelenkte Manipulatoren nicht direkt anwendbar sind. Da kontinuierlich verteilte Sensoren und Aktoren fehlen, bedeutet die Steuerung eines weichen Manipulators die Steuerung eines nichtlinearen Systems, das stark untersteuert ist. Eine zusätzliche Schwierigkeit ergibt sich aus den Sehnen, die nur einseitig betätigt werden. Um Trajektorien zu erzeugen, werden wir an optimalen Kontrollstrategien arbeiten, die in der Lage sind, diese spezifischen Schwierigkeiten zu lösen. Für das Problem der Bahnverfolgung streben wir eine modellbasierte Rückkopplungsstrategie an, die es erlaubt, eine Vorwärtssteuerung einzubauen und die die günstige Dynamik des Manipulators mit inhärent stabilen Gleichgewichtskonfigurationen ausnutzt Die Entwicklung des Manipulators wirft natürlich neue Forschungsfragen bezüglich Design, Herstellung, Modellierung und Steuerung auf, die in diesem Projekt behandelt werden und deren Antworten uns zu einer neuen Generation weicher Roboter führen werden. (DFG - GEPRIS - Serielle Manipulatoren aus weichem Material mit Sehnenantrieb)