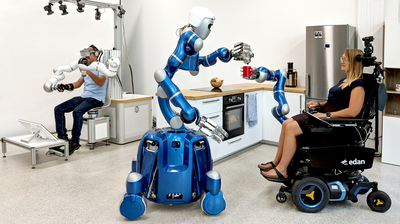
Terrestrische Assistenz
Wäsche machen und kochen, die Spülmaschine aus- oder die Wohnung aufräumen, am Arbeitsplatz unterstützen – egal ob im privaten, kommerziellen, pflegerischen oder medizinischen Umfeld, in allen Lebenslagen soll die Robotik künftig Erleichterung bringen.