
Telemanipulation in der minimal invasiven Chirurgie


{kind=link}
Bei der konventionellen minimal invasiven Chirurgie (MIC) wird durch kleine Einschnitte in der Haut des Patienten operiert, um möglichst wenig gesundes Gewebe zu schädigen. Der Chirurg verwendet lange, schlanke Instrumente und ist vom eigentlichen Operationsgebiet räumlich getrennt. Diese Anordnung stellt auf Grund der verlorengegangenen Hand-Auge-Koordination und des fehlenden direkten manuellen Kontakts eine Herausforderung für die Fähigkeiten jedes Operateurs dar. Aus diesem Grund können viele komplexere Eingriffe bisher noch nicht minimal invasiv durchgeführt werden. Um die Nachteile der konventionellen MIC zu überwinden, spielen Telepräsens- und Telemanipulationstechniken eine entscheidende Rolle: Bei der minimal invasiven robotischen Chirurgie (MIRC) bewegt der Chirurg die Instrumente nicht mehr direkt. Stattdessen halten spezialisierte Roboterarme die Instrumente und werden durch den Chirurgen von einer Eingabekonsole aus ferngesteuert. Dabei hat der Operateur dank 3D-Endoskopbildern, Force Feedback und wiederhergestellter Hand-Auge-Koordination den Eindruck eines direkten Zugangs zum Operationsfeld.
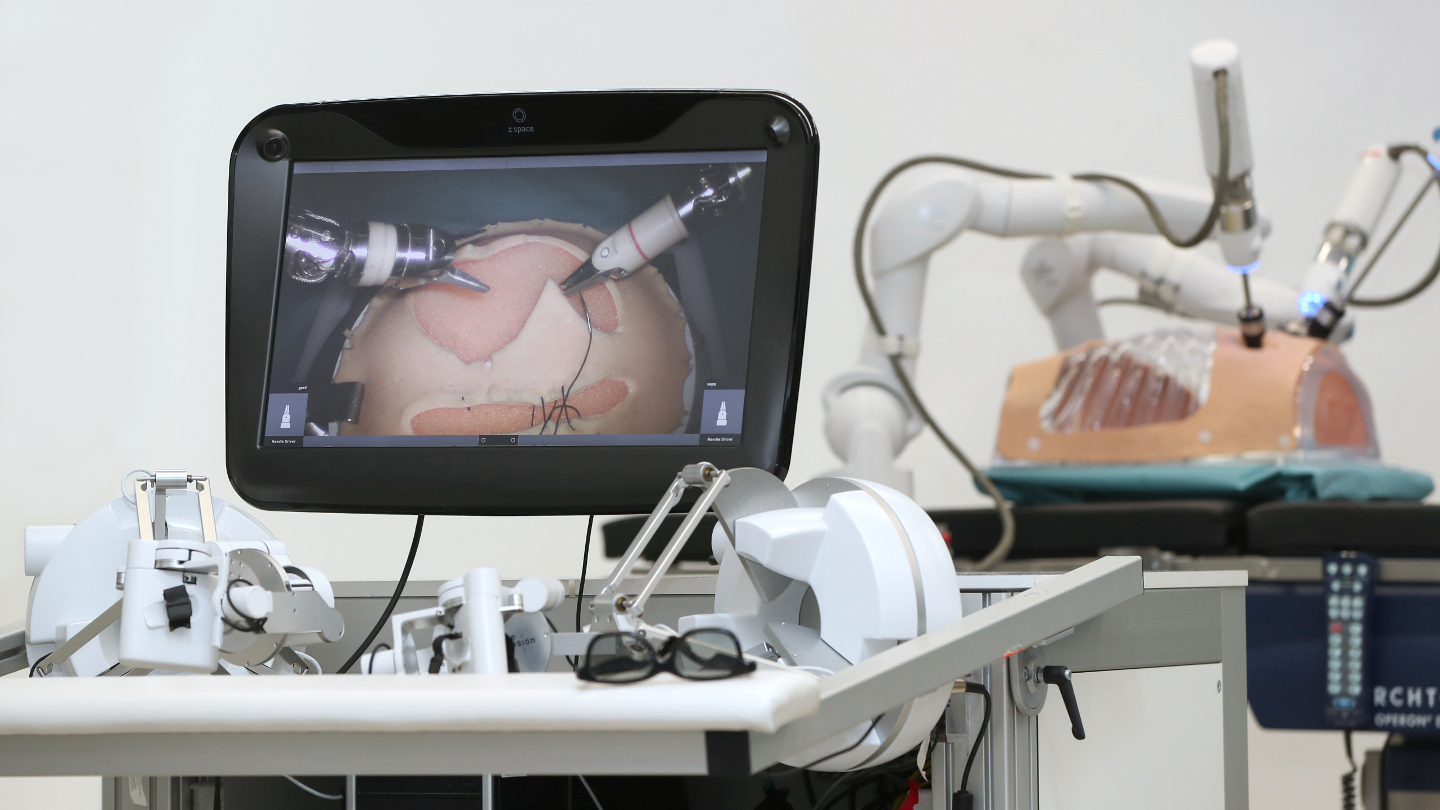
Das Telechirurgiesystem DLR MiroSurge umfasst eine Eingabekonsole (Masterkonsole) mit einem 3D-Display und zwei haptischen Eingabegeräten sowie drei MIRO-Roboterarme. Zwei MIROs halten die laparoskopischen Instrumente (DLR MICA), der dritte MIRO führt (automatisch) ein Stereovideolaparoskop. Dem Chirurgen an der Masterkonsole werden sowohl der Videostream als auch zusätzliche Informationen zum Systemzustand wie verwendete Instrumente oder Arbeitsraumgrenzen angezeigt. Dabei kann der Chirurg Arbeitsraumgrenzen oder Kollisionen der Werkzeuge nicht nur sehen, sondern dank Force Feedback auch an den Eingabegeräten fühlen.
Unser gegenwärtiger Forschungsschwerpunkt ist die Weiterentwicklung der vorhandenen Forschungsplattform für robotische Telechirurgie zu einem kognitiven robotischen Assistenzsystem. Dieses soll dem Chirurgen situationsabhängig alle benötigten Informationen optimal präsentieren und zugleich fähig sein, kleinere Aufgabe semiautonom durchzuführen.
Video

The DLR Mirosurge Robotic Telesurgery of the future
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Veröffentlichungen
Andreas Tobergte, Patrick Helmer, Ulrich Hagn, Patrice Rouiller, Sophie Thielmann, Sebastien Grange, Alin Albu-Schäffer, Francois Conti, and Gerd Hirzinger, "The sigma.7 haptic interface for MiroSurge: A new bi-manual surgical console" in Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, September 2011.
Andreas Tobergte, Patrick Helmer, Ulrich Hagn, Sophie Thielmann, and Gerd Hirzinger, "Eine Chirurgenkonsole für MiroSurge", in 10. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Magdeburg, Germany, September 2011. elib
G. Hirzinger, and U. Hagn, "Flexible Heart Surgery", German Research (Magazine of the German Research Foundation DFG), 1/2010.
Andreas Tobergte, Georg Passig, Bernhard Kübler, Ulrich Seibold, Ulrich Hagn, Florian Fröhlich, Rainer Konietschke, Stefan Jörg, Mathias Nickl, Sophie Thielmann, Robert Haslinger, Martin Gröger, Alexander Nothhelfer, Luc Le-Tien, Robin Gruber, Alin Albu-Schäfer, and Gerd Hirzinger, "MiroSurge - Advanced User Interaction Modalities in Minimally Invasive Robotic Surgery", MIT Press Journals: PRESENCE - Teleoperators and Virtual Environments, vol. 19, no. 5, pp. 400-414, October 2010. DOI: 10.1162/pres_a_00022 2010 elib
U. Hagn, R. Konietschke, A. Tobergte, M. Nickl, S. Jörg, B. Kübler, G. Passig, M. Gröger, F. Fröhlich, U. Seibold, L. Le-Tien, A. Albu-Schäffer, A. Nothelfer, F. Hacker, M. Grebenstein, and G. Hirzinger, "DLR MiroSurge - A Versatile System for Research in Endoscopic Telesurgery", International Journal of Computer Assisted Radiology and Surgery, vol. 5, no. 2, pp. 183-193, March 2010. doi: 10.1007/s11548-009-0372-4 elib
A. Tobergte, R. Konietschke, and G. Hirzinger, "Planning and Real Time Control of a Minimally Invasive Robotic Surgery System", in Proc. of the IEEE International Conference on Robotics and Automation, Kobe, Japan, May 2009. elib
R. Konietschke, U. Hagn, M. Nickl, S. Jörg, A. Tobergte, G. Passig, U. Seibold, L. Le-Tien, B. Kübler, M. Gröger, F. Fröhlich, Ch. Rink, A. Albu-Schäffer, M. Grebenstein, T. Ortmaier, and G. Hirzinger, "The DLR MiroSurge - A Robotic System for Surgery", video contribution presented at ICRA 2009, Finalist for best video award, Kobe, Japan, May 2009. elib
G. Hirzinger, and U. Hagn, "MiroSurge - ein innovatives Robotik-System für die minimal invasive Chirurgie", Zentralbl Chir 2009, vol. 134, no. 5, pp. 397-400. doi: 10.1055/s-0029-1241106 elib
U. Hagn, M. Nickl, S. Jörg, A. Tobergte, B. Kübler, G. Passig, M. Gröger, F. Fröhlich, U. Seibold, R. Konietschke, L. Le-Tien, A. Albu-Schäffer, M. Grebenstein, T. Ortmaier, and G. Hirzinger, "DLR MiroSurge - towards versatility in surgical robotics", in Proc. of 7. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Leipzig, Germany, September 2008, pp. 143-146. elib
U. Hagn, T. Ortmaier, R. Konietschke, B. Kübler, U. Seibold, A. Tobergte, M. Nickl, S. Joerg, and G. Hirzinger, "Telemanipulators for Remote Minimally Invasive Surgery", IEEE Robotics and Automation Magazine (RAM), vol. 15, no. 4, pp. 28-38, 2008. doi: 10.1109/MRA.2008.929925 elib