
Development of Tele-operation Control for a Free-floating Robot during the Grasping of a Tumbling Target
In this section some of the work carried out on the development of a simulator for the implementation of the inverse kinematics of a free-floating robot with a redundant manipulator (7 DoF) is presented. Note the distinction between free-floating and free-flying, being that for the former control actions on the base body are absent, while for the latter they are not.
Some of the main points which were considered are the following:
Real-time implementation of the inverse kinematics of a free-floating robot with high dynamic coupling (satellite/robot mass ratio = 1/7). Note that due to the high dynamic coupling, it was found that a rigorous modeling of the free-floating robot dynamics is necessary in order to be able to direct the end-effector in a useful manner. However, for the grasping task, for which a point on the target has to be tracked, further analysis was necessary to account for singularity avoidance and robot kinematical constrains.
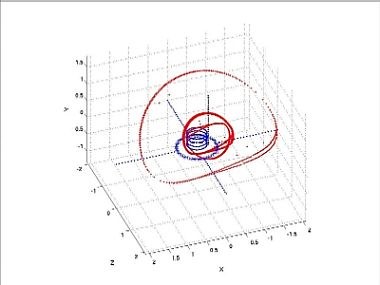
- Study of the singularity avoidance problem. A graphical representation of the robot singularities in Cartesian or joint space can only be obtained for the case of a spacecraft which is provided with reaction wheels on board. These can in fact be used to control the end-effector and as such eliminate the singularities in its rotational motion. The below figure shows an analytical solution for the singularities which result for such a system.

- Development of an optimization algorithm for the optimal initial manipulator configuration. Since the position of the robot singularities cannot be represented neither in Cartesian nor in joint space (in the absence of reaction wheels), to aid the operator in avoiding them, a predictive simulation was thought necessary. This gave rise to the development of an optimization tool which finds the best initial configuration of the spacecraft/robot for executing a given tracking task, as shown in the video below.
