ASURO ist ein kleiner, frei in C programmierbarer mobiler Roboter, welcher für die Lehre am DLR im Institut für Robotik und Mechatronik entwickelt wurde. Der Bausatz eignet sich für Hobbybastler, Schüler- und Studienprojekte, Lehrwerkstätten sowie Fortbildungen im Bereich Elektrotechnik und Mechatronik.
Im Jahr 2003 wurde ASURO erstmals der Öffentlichkeit präsentiert.
Größe:
117 mm x 122 mm x 45 mm
Gewicht:
165 g
Motorik:
2 Lichtsensoren zur Linienverfolgung
4 Leuchtdioden
Sensorik:
2 Lichtsensoren zur Linienverfolgung
6 Taster
2 Lichtschranken für die Odometrie
Energie:
4 Akkus
Kommunikation:
Infrarot
Besonderheiten:
Sowohl für Hobbybastler, Schüler und Studenten geeignet
Softwareerstellung ausschließlich mit Freeware-Tools
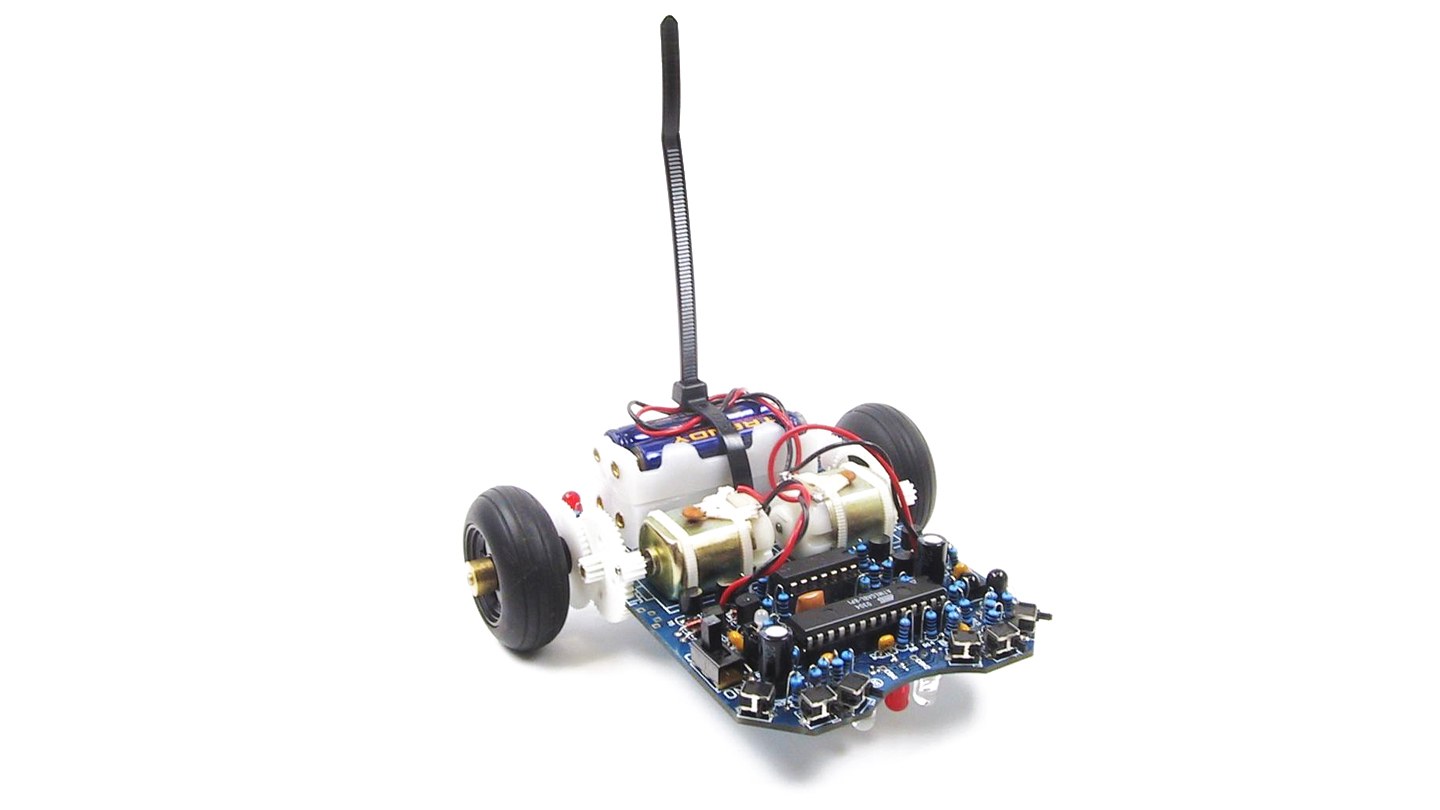
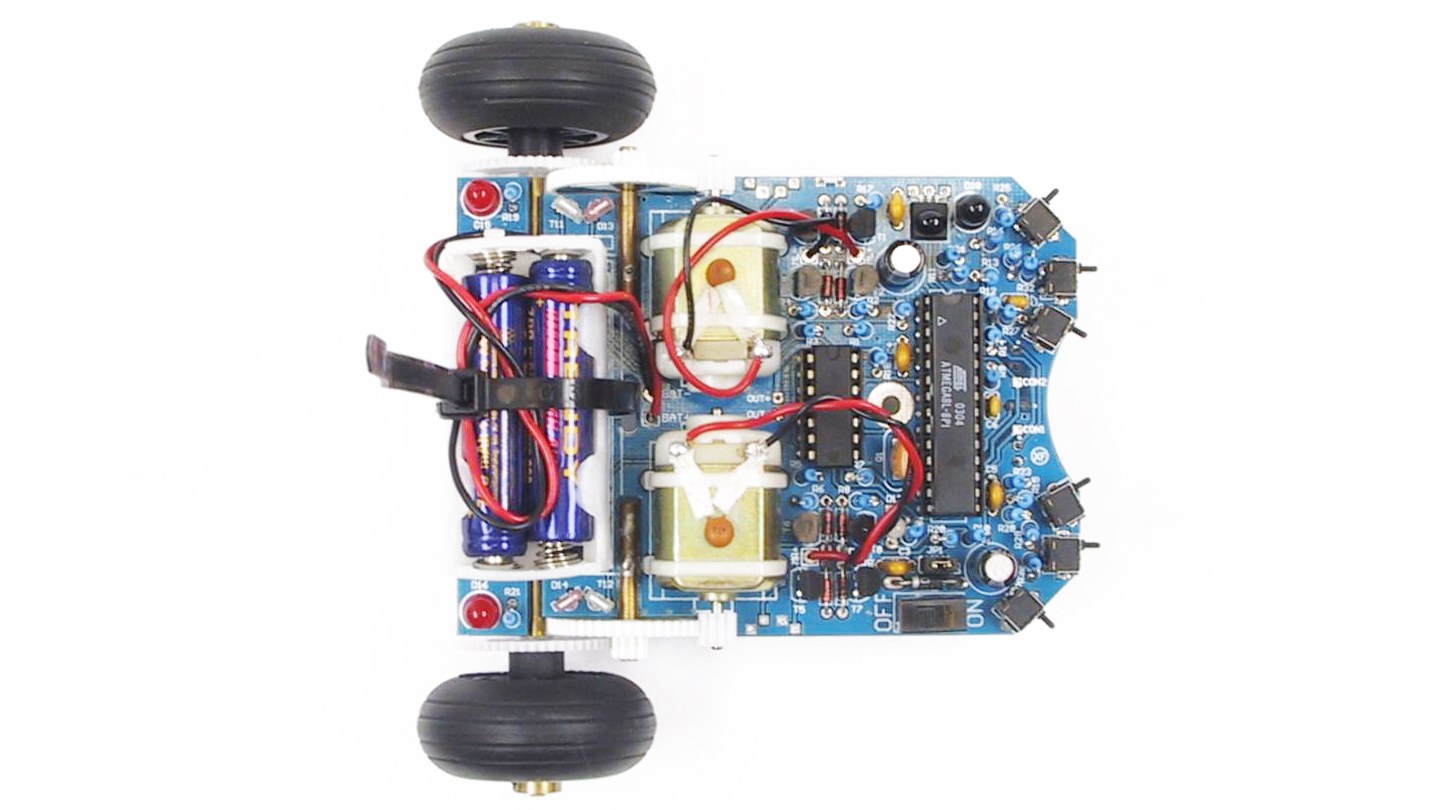
Systembeschreibung
ASURO ist das beste Beispiel dafür, dass Roboter auch ohne aufwendige und teure Software, Technik und Werkzeugmaschinen konstruiert werden können. Die gesamte Entwicklung der Elektronik ist (für den privaten Bereich) mit Freeware-Werkzeugen möglich. Der autonome und multisensorielle Roboter besitzt unter anderem einen RISC-Prozessor sowie zwei Motoren, die unabhängig voneinander angesteuert werden können. Des Weiteren verfügt er neben sechs Kollisionstastern und einer optischen Einheit zur Verfolgung einer Linie auch über zwei Odometer und einige Anzeigeelemente. Damit kann ASURO die Helligkeit des Untergrundes erfassen, sowie Hindernisse erkennen und umfahren. An jedem Rad ist eine nach innen gerichtete, abwechselnd schwarz-weiß sektorisierte Scheibe installiert, die das von einer Infrarot-LED abgestrahlte Licht reflektiert. Die Helligkeitsschwankungen des reflektierten Lichts werden mit einem Fototransistor gemessen; ihre Frequenz ist proportional zur Anzahl der Umdrehungen. Die Infrarot-Kommunikationseinheit ermöglicht sowohl die Programmierung als auch die Steuerung des Roboters über einen PC via USB. Programmiert wird die Maschine in C. Der vordere Kontakt zum Boden wird durch eine halbe Tischtenniskugel gebildet, auf die der Roboter aufsteigt.
Hello-World-Programm in der Sprache von ASURO:
#include "asuro.h" main (void){ unsigned int i; Init(); while(1){ StatusLED(RED); for(i = 0; i < 847; ++i) Sleep(255); StatusLED(GREEN); for(i = 0; i < 847; ++i) Sleep(255); } }



{kind=link}
{kind=link}
{kind=link}