Die Hand CLASH (Compliant Low-cost Antagonistic Servo Hand) wurde im Rahmen des EU-Projekts Soma erstellt, um Früchte und Gemüse zu greifen. Basierend auf variabler Steifigkeitsaktuierung, vergleichbar mit der David-Hand, wurde mit Hilfe von Rapid Prototyping und optimierter Seilverkopplung diese sehr günstige und performante Hand entwickelt. Die Hand wurde 2018 auf der AUTOMATICA erstmals der Öffentlichkeit präsentiert.
Technische Daten
Größe:
110 × 60 × 78 mm³
Gewicht:
640g
Freiheitsgrade:
7
Nominale Nutzlast:
20N Daumen, 10N Finger
Energieversorgung:
6–8V
Geschwindigkeit:
360°/s
Benutzerschnittstellen:
USB
Besonderheiten:
integrierbarer Kontrollrechner
optionale Batterieversorgung
8 Seilkraftsensoren
Taktile Sensoren in der Handinnenfläche
menschliche inspirierte Seilverkopplung
Systembeschreibung
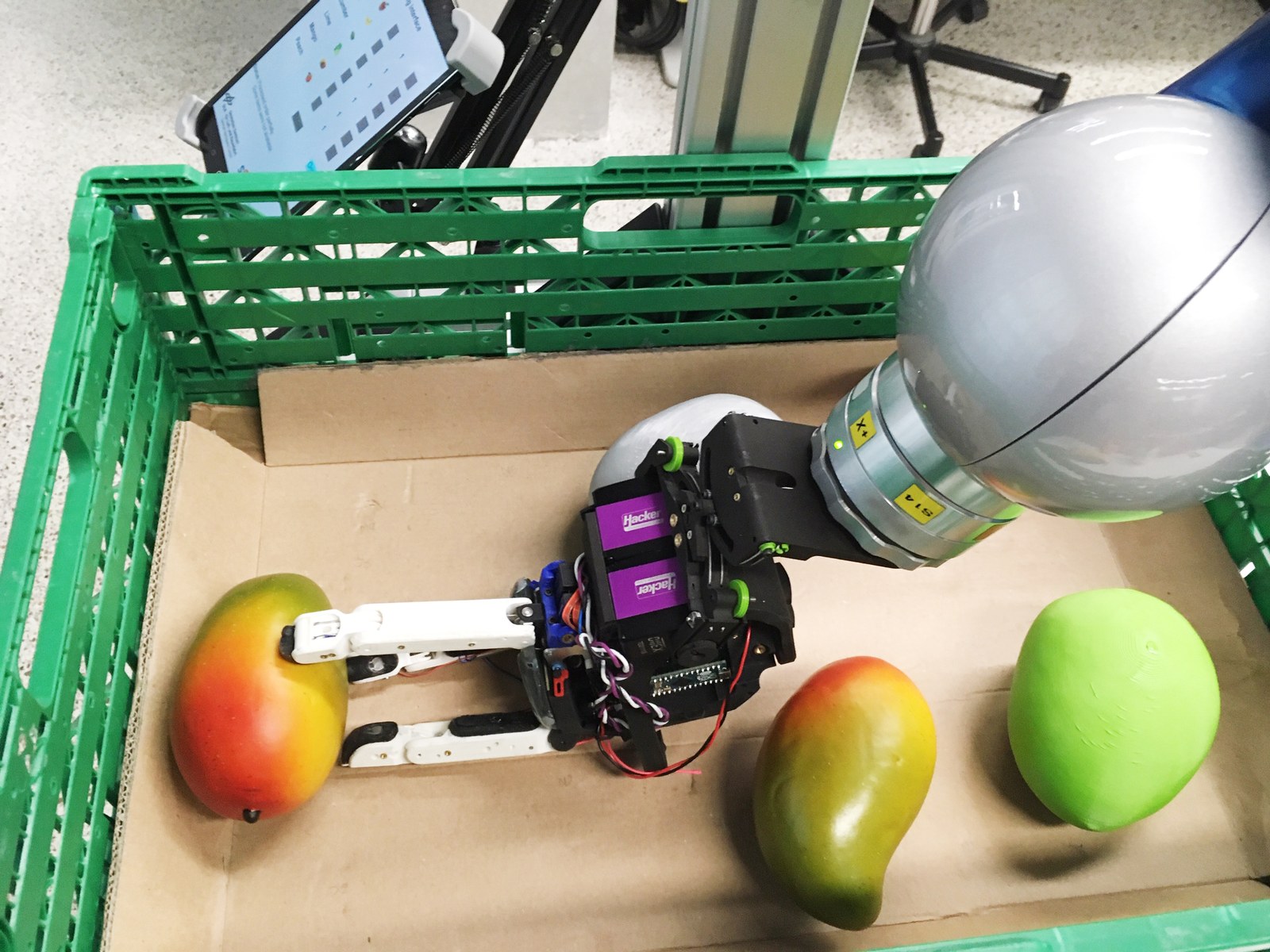
Eine wichtige Eigenschaft dieser Hand ist, dass die mechanische Steifigkeit der Finger durch zwei zusätzliche Antriebe angepasst werden kann. Dies erlaubt z.B. beim Greifen einer Mango, in der Kontaktphase sehr weich zu sein, um die Anzahl der Kontaktpunkte zu erhöhen, aber gleichzeitig die Kontaktkräfte klein zu halten. Zum Anheben wird die Steifigkeit erhöht, um einen sicheren Griff des Objekts zu gewährleisten.
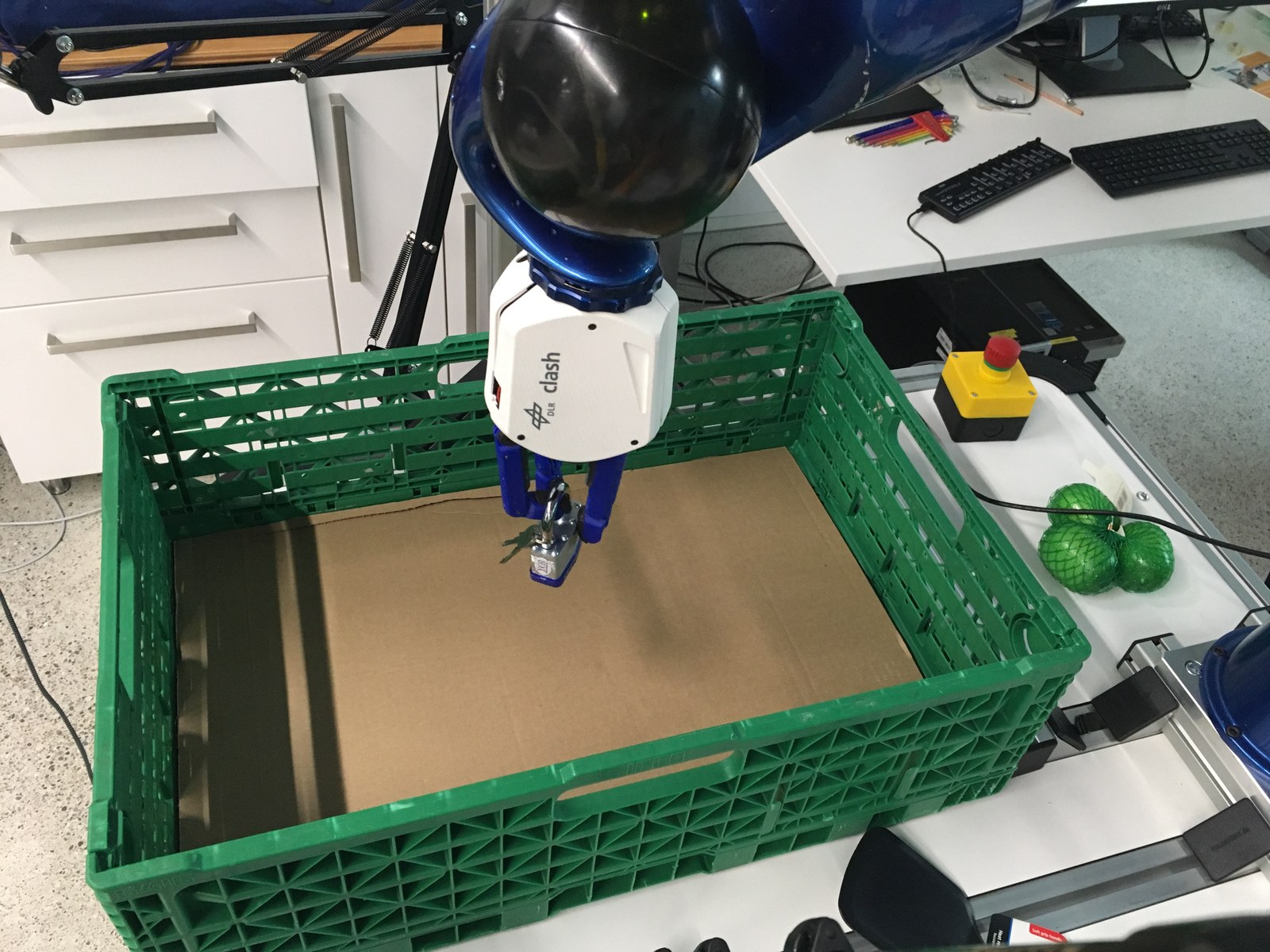
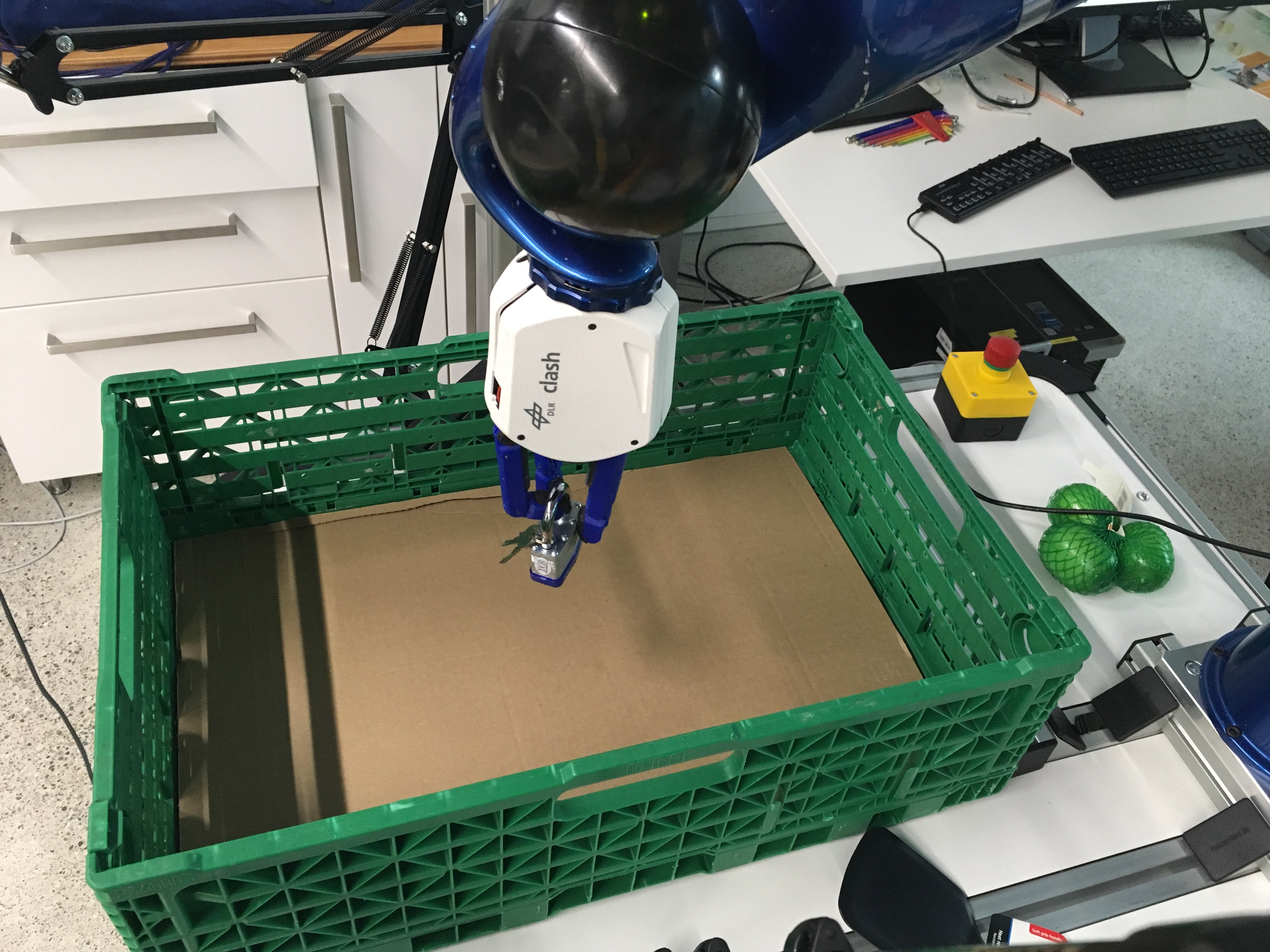
CLASH greift eine Limette
Die Hand wurde speziell für das Greifen von Früchten und Gemüse entwickelt, wie man hier an einer Limette sieht. Der Use Case ist der Online Supermarkt, wo in Zukunft auch Roboter diese Jobs übernehmen können.
Ein Hauptaugenmerk des EU Projekt SOMA war es, die Umwelt als Hilfsmittel zu nutzen, um Objekte besser zu greifen. Das CLASH Handgelenk erlaubt es nun den Wandgriff in der Box auszuführen ohne den Bewegungsbereich des Roboterarms einzuschrenken.
Friedl et al. (2018) CLASH: Compliant Low cost Antagonistic Servo Hands. In: Proc. IEEE/RSJ Int Intelligent Robots and Systems (IROS) Conf, IROS 2018, 1.-5. Oktober 2018, Madrid [elib]
Friedl et al. (2019) CLASH WRIST - A hardware to increase the capability of CLASH fruit gripper to use environment constraints exploration, IROS Workshop: Factory of the Future, November 2019, Macao [elib]




{kind=link}
{kind=link}
{kind=link}