
Shared Autonomy
Eine Beeinträchtigung bei komplexen Telepräsenzsystemen ist der Rückgang an Feinfühligkeit bei der Interaktion mit der entfernten Umgebung. Auch wenn das Eingabegerät die Bewegungen des Operators akurat messen kann, ist es nicht gegeben, dass das robotische System alles Vorgegebene ausführen kann. Dies gilt vor allem bei der Steuerung von robotischen Händen oder anderen komplexen Endeffektoren. Es ist nicht nur schwierig alle Bewegungen der menschlichen Hand zu messen, sondern es existiert auch keine robotische Hand, die die Vielseitigkeit der menschlichen Hand wiedergeben kann. Dadurch sind Übung und Vorwissen des Operators unabdingbar, um einen komplexen robotischen Endeffektor mit direktem Mapping von menschlicher Fingerbewegung zu steuern. Zusätzlich erfordert es eine hohe Arbeitsbelastung des Operators.
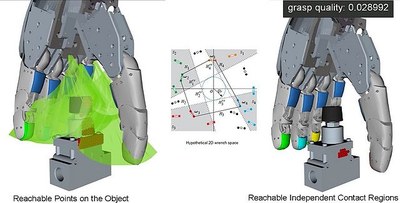
Unser Ansatz zur Steuerung einer robotischen Hand ist der Einsatz von semi-autonomen Teilaufgaben, die das direkte Mapping ersetzen. Unser robotisches System ist mit zwei DLR-HIT Händen II als Endeffektoren ausgestattet. Deren Fingerpositionen werden online geplant basierend auf der kommandierten Armposition. Dazu verwenden wir erreichbare, unabhängige Kontaktregionen, die robuste Griffe für eine robotische Hand darstellen. Der Operator muss nur noch "öffnen" und "schließen" kommandieren, wenn er den geplanten Griff ausführen möchte.
Im Gegensatz zu vielen anderen Greifplanern werden mit diesem Ansatz keine Griffe vorberechnet und in einer Datenbank gespeichert. Stattdessen werden mit Hilfe des Arbeitsraums der robotischen Hand alle zu diesem Zeitpunkt erreichbaren Punkte auf dem Objekt berechnet. Dies geschieht innerhalb einer Millisekunde mit dem Voxmap-Pointshell Algorithmus. Basierend auf den erreichbaren Punkten werden Kontaktregionen berechnet, die einen stabilen "force-closure" Griff garantieren, solange jeder Finger innerhalb der Kontaktregion das Objekt berührt. Der gewünschte Griff wird aus den Mittelpunkten der Kontaktregionen bestimmt.

Ausgewählte Veröffentlichungen
- M. Roa, K. Hertkorn, C. Borst, and G. Hirzinger: Reachable independent contact regions for precision grasps, in Proc. IEEE Int. Conf. on Robotics and Automation, 2011, pp. 5337–5343.
- M. Roa, K. Hertkorn, F. Zacharias, C. Borst, and G. Hirzinger: Graspability map: A tool for evaluating grasp capabilities, in Proc. IEEE Int. Conf. on Intelligent Robots and Systems, 2011, pp. 1768-1774.
- K. Hertkorn, M. Roa, M. Brucker, P. Kremer, and C. Borst: Virtual reality support for teleoperation using online grasp planning, in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2013.