
Biomechanik
Der Mensch verfügt über bestimmte Fähigkeiten, wie Vielseitigkeit und Anpassungsfähigkeit, die wir bei der Entwicklung von Robotern ebenfalls anstreben. Dafür müssen wir zuerst verstehen, welche Strukturen und Mechanismen diesen Fähigkeiten zu Grunde liegen. Wir möchten sehen, wie die Natur die Funktionalität umgesetzt hat, und möglichst auch, warum auf diese Weise. Um das nötige Wissen zu erhalten, führen wir Studien an Menschen durch, und werten die erhaltenen Daten gründlich aus. Die Erkenntnisse über den Menschen sollen bei der Konstruktion künstlicher Systeme mit ähnlichen Fähigkeiten helfen. Das Ziel ist dabei nicht, die Strukturen und Mechanismen originalgetreu zu kopieren, sondern mit technischen Mitteln ein ähnliches Verhalten zu erreichen.


Im Laufe der Evolution hat sich die Beweglichkeit der menschlichen Hand so entwickelt, dass sie als enorm vielseitiges Greiforgan eine ungeheure Vielzahl von verschiedenen Gegenständen greifen kann. Umgekehrt wurden aber auch die Gegenstände speziell für die Benutzung durch die menschliche Hand gestaltet. Um die Konstruktion von ähnlich vielseitigen Roboterhänden zu unterstützen, möchten wir die Beweglichkeit der menschlichen Hand in einem mathematischen Modell abbilden. Dazu vermessen wir zunächst verschiedene Handstellungen präzise mit Magnetresonanztomographie (MRT) und optischem Marker-Tracking. Die gemessenen Handstellungen dienen als Zielvorgabe, die das mathematische Modell erreichen soll.
Unser Modell besteht aus einer Reihen von Drehachsen im Raum, mit denen die einzelnen Fingersegmente jeweils fest verbunden sind. Die Positionen und Orientierungen der Achsen optimieren wir computerunterstützt so, dass die gemessenen Handstellungen möglichst genau nachgebildet werden können. Eine Restabweichung bleibt immer, da das Modell eine Vereinfachung gegenüber der Realität darstellt, und zudem die Messgenauigkeit begrenzt ist. Je nach Anzahl der Drehachsen und der verwendeten Messmethode liegt die Restabweichung im Mittel zwischen 0,9 und 3 mm bzw. zwischen 1,6 und 6 Grad [2].
Beim optischen Marker-Tracking werden die Positionen von Kugeln verfolgt, die auf der Handoberfläche entweder direkt oder mit sogenannten Markersternen befestigt sind. Dabei muss die Bewegung der Haut über die Knochen mitmodelliert werden — anderenfalls stellt sie einen Messfehler der Knochenlage dar, das sogenannte Hautbewegungsartefakt. Die Hautbewegung über die Knochen ist besonders groß in der Nähe von Gelenken. Allerdings haben wir herausgefunden, dass dort ein Großteil der Bewegung mit Hilfe eines einfachen Modells erklärt werden kann [1]. Bei MRT kann hingegen der Knochen direkt sichtbar gemacht werden, so dass kein Hautbewegungsartefakt auftritt. Andererseits ist hier die Herausforung, die Knochenbewegung korrekt zu bestimmen, indem die Punktwolken eines Knochen in zwei verschiedenen Aufnahmen zur Deckung gebracht werden. Unsere Untersuchungen haben ergeben, dass die Fehler, die dabei entstehen, in einer ähnlichen Größenordnung wie die des Hautbewegungsartefakts liegen [2].
In weitergehenden Studien werden die Gelenkwinkel der Fingergelenke beim Greifen von Objekten verfolgt. Dabei dienen die oben genannten Handmodelle dazu, die Messgenauigkeit zu erhöhen. Das Ziel der Studien ist es, Kopplungen zwischen den Gelenkwinkeln zu finden, um die Komplexität der Handbewegung zu verringern [3].
Die Festlegung einer kartesischen Steifigkeits-Matrix von robotischen Systemen mit variabler Impedanz, seien es aktiv nachgiebige oder intrinsisch elastische Systeme, ist immer noch eine heuristische Aufgabe. Weiterhin muss diese Steifigkeit der robotischen Systeme während der Bewegung laufend angepasst werden. Der Mensch lernt diese Steifigkeit seit seiner Geburt durch Interaktionen anzupassen und zeigt eine Feineinstellung dieser in Abhängigkeit der Aufgabe und Umgebung. Wir wollen die zu Grunde liegenden Mechanismen zur Einstellung der Steifigkeit in Hand und Arm verstehen und die entwickelten Modelle auf robotische Systeme transferieren.
Unsere Ziele sind:
- Verstehen, welche Kostenfunktionen der Anpassung der mechanischen Impedanz (Sonderfall: Steifigkeit) beim Menschen zu Grunde liegen, wie relevant die reinen passiv mechanischen Parameter — definiert durch das Muskel-Skelett System — sind, und wann und wie das zentrale Nervensystem diese mechanischen Parameter variiert;
- Die Entwicklung neuartiger Mensch—Maschine-Schnittstellen zur kontinuierlichen Erfassung der mechanischen Impedanz, um damit die variable Impedanz unserer Roboter in einem Telepräsenz-Szenario zu kommandieren (dazu gehören auch Hand-Prothesen, Rehabilitationsrobotik und Tele-medizinische robotische Systeme).
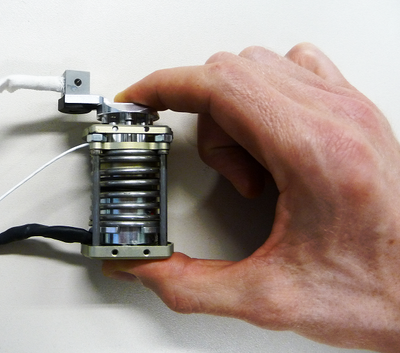
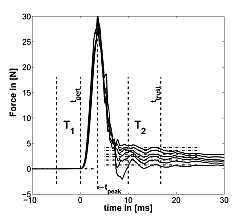
Zur Erfassung der menschlichen Impedanz haben wir verschiedene Messgeräte und Methoden entwickelt, mit denen die Erfassung der Steifigkeit der Finger ([4], [5]) und Arme ([6], [7], [8]) möglich ist. Dabei kombinieren wir klassische Perturbationsmethoden mit EMG-basierter Identifikation unter Verwendung von Kraft-Drehmomenten-Sensoren und optischen Trackingsystemen.

[1] Gustus, Agneta and Stillfried, Georg and Visser, Judith and Jörntell, Henrik and van der Smagt, Patrick (2012) Human hand modelling: kinematics, dynamics, applications. Biological Cybernetics. DOI: 10.1007/s0042201205324.
[2] Stillfried, Georg and Hillenbrand, Ulrich and Settles, Marcus and van der Smagt, Patrick (2013) MRI-based skeletal hand movement model. In: The Human Hand: A Source of Inspiration for Robotic Hands Springer Tracts in Advanced Robotics. Springer.
[3] Gabiccini, Marco and Stillfried, Georg and Marino, Hamal and Bianchi, Matteo (2013) A data-driven kinematic model of the human hand with soft-tissue artifact compensation mechanism for grasp synergy analysis. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (ISSN: 1042-296X). IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 3-8, 2013, Tokyo, Japan. ISSN 1042-296X
[4] Höppner, Hannes and Lakatos, Dominic and Urbanek, Holger and Castellini, Claudio and van der Smagt, Patrick (2011) The Grasp Perturbator: Calibrating human grasp stiffness during a graded force task. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3312-3316. Robotics and Automation (ICRA), 2011 IEEE International Conference on, Shanghai, China.
[5] Höppner, Hannes and McIntyre, Joseph and van der Smagt, Patrick (2013) Task Dependency of Grip Stiffness—A Study of Human Grip Force and Grip Stiffness Dependency during Two Different Tasks with Same Grip Forces. PLoS ONE, 8 (12), e80889. Public Library of Science. DOI: [10.1371/journal.pone.0080889]. ISSN 1932-6203.
[6] Höppner, Hannes and Lakatos, Dominic and Urbanek, Holger and van der Smagt, Patrick (2010). The Arm-Perturbator: Design of a Wearable Perturbation Device to measure Limb Impedance. International Conference on Applied Bionics and Biomechanics (ICABB)
[7] Lakatos, Dominic and Petit, Florian and van der Smagt, Patrick (2011) Conditioning vs. Excitation Time for Estimating Impedance Parameters of the Human Arm. In: Proceedings. Humanoids 2011, International Conference on Humanoid Robots, 26. Okt. - 28. Okt. 2011, Bled, Slovenia.
[8] Lakatos, Dominic and Rüschen, Daniel and Bayer, Justin and Vogel, Jörn and van der Smagt, Patrick (2012) Identification of human limb stiffness in 5 DoF and estimation via EMG. ISER 2012, 17.-21. Jun. 2012, Quebec City, Canada.