Skip to main content
Skip to navigation
Skip to footer
DLR Portal
Press
Accessibility
de
en
Institute of Robotics
and Mechatronics
About us
About us
▾
Institute of Robotics and Mechatronics
▾
History of the institute
▾
360 degree tour
▾
Departments
▾
Mechatronic Systems
▾
Analysis and Control of Advanced Robotic Systems
▾
Autonomy and Teleoperation
▾
Perception and Cognition
▾
Cognitive Robotics
▾
Institute Development and Central Management
▾
Contact persons
▾
Location
Research
Research
▾
Robotic systems
▾
Aerial robots
▾
Hands
▾
Humanoids
▾
Future Manufacturing
▾
Legged
▾
Medical/Healthcare
▾
Mobile Platforms
▾
Human-Machine Interfaces
▾
Space assistance
▾
History
▾
Applications
▾
Space Assistance
▾
Orbital Robotics
▾
Planetary Exploration Robotics
▾
Future Manufacturing
▾
Terrestrial Assistance
▾
Field Robotics
▾
Expertise
▾
Autonomy
▾
3D Perception
▾
Feedback control
▾
Telepresence & VR
▾
Heritage
▾
Projects & missions
▾
Current projects
▾
Completed Projects
▾
Publications
▾
Papers
▾
Software
▾
Scientific Datasets
Innovation & transfer
Innovation & transfer
▾
Spin-offs
▾
3D-Input
▾
Agile Robots
▾
Blickfeld
▾
Elektra Solar
▾
Kastanienbaum
▾
Kinetik Space
▾
Kinfinity
▾
Leverage Robotics
▾
Roboception
▾
RoboDrive
▾
Sensodrive
▾
Tacterion
▾
Tilo Wüsthoff Industrial Design
▾
Wessling Robotics
Latest
Latest
▾
News
▾
2024
▾
2023
▾
2022
▾
2021
▾
2020
▾
2019
▾
2018
▾
2017
▾
2016
▾
2015
▾
2014
▾
2013
▾
2012
▾
2011
▾
2008
▾
Press review
Multimedia
Multimedia
▾
Images
▾
Videos
▾
Brochures
Career & education
Career & education
▾
Vacancies
▾
Student jobs
>
Research
>
Projects & missions
>
>
Completed Projects
>
Kontur-2
Home
>
Research
>
Projects & missions
>
Completed Projects
>
Kontur-2
Kontur-2
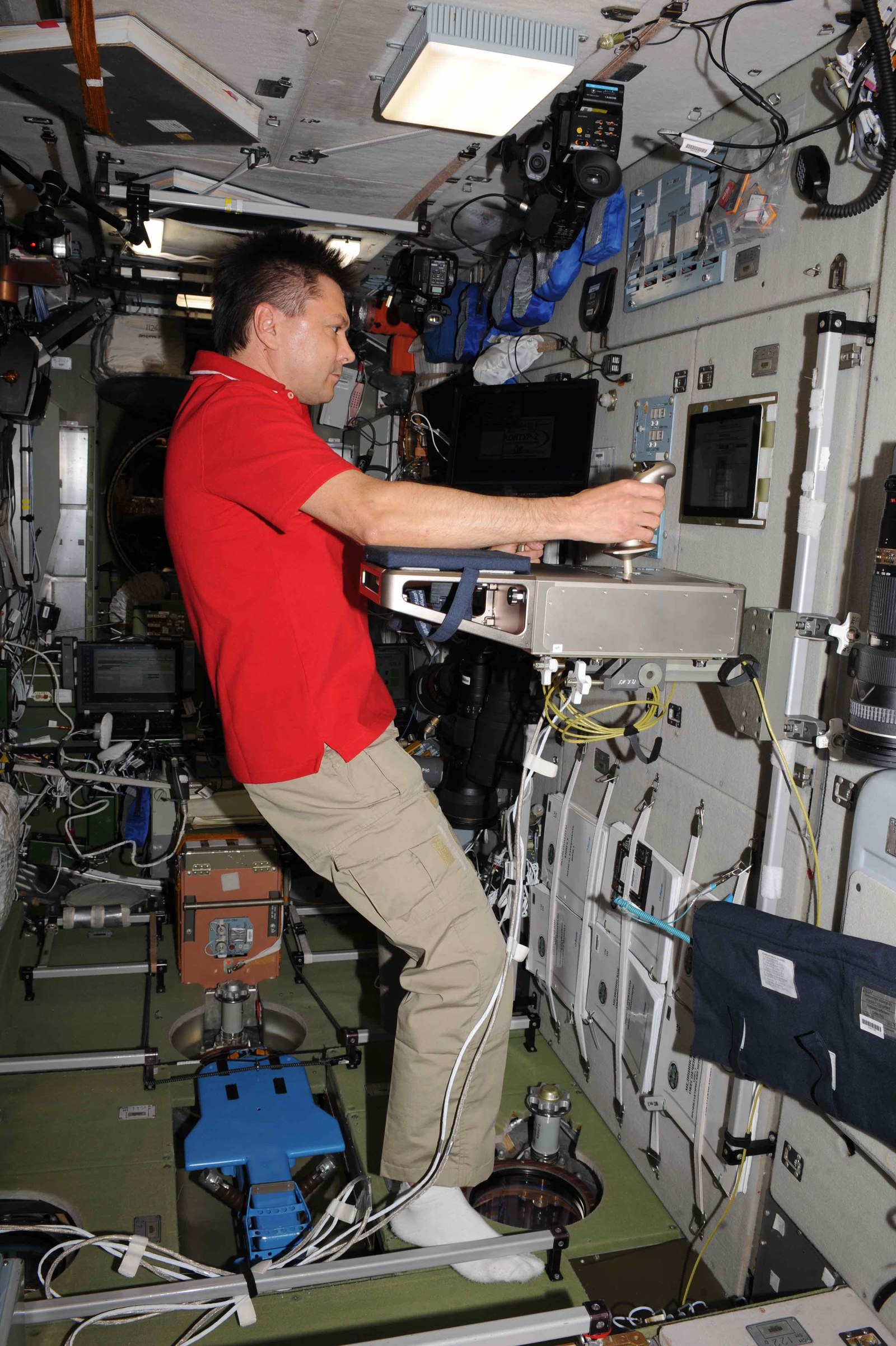
Oleg Kononenko with Kontur-2 joystick on the ISS
Cosmonaut Oleg Kononenko with the Kontur-2 joystick in the Russian segment of the ISS
Image:
1/8,
Credit:
ROSKOSMOS/O. Kononenko
Download
Download
Oleg Kononenko with Kontur-2 joystick on the ISS
Cosmonaut Oleg Kononenko with the Kontur-2 joystick in the Russian segment of the ISS
Image:
2/8,
Credit:
ROSKOSMOS/O. Kononenko
Download
Download
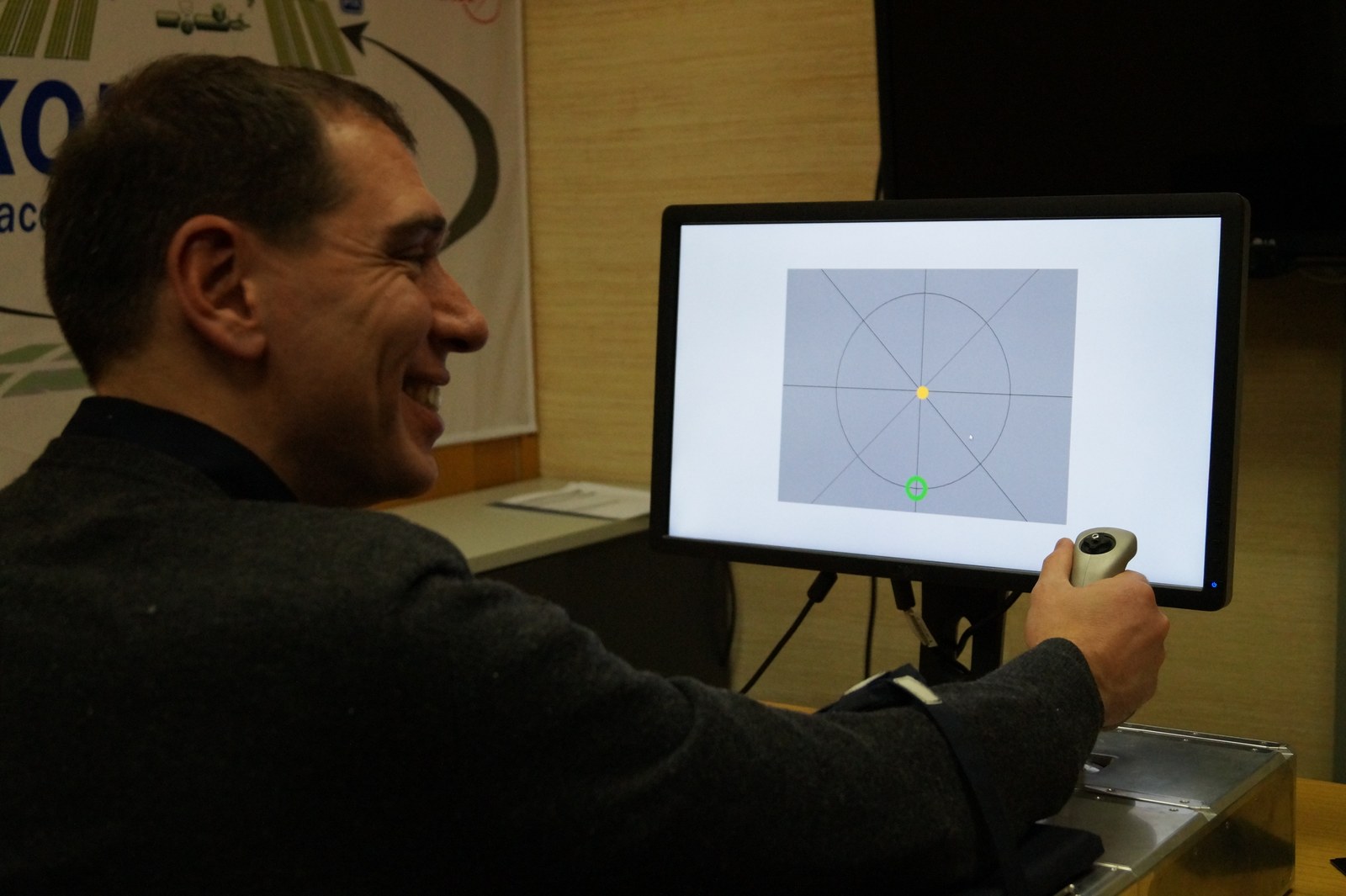
Cosmonaut training with Sergei Volkov
Cosmonaut training with Sergei Volkov in December 2014 at the DLR
Image:
8/8,
Credit:
DLR/Oliver Glück (CC BY-NC-ND 3.0)
Download
Download
Related Articles
Kontur-2: History



{kind=link}
{kind=link}
{kind=link}