
Classification
Classifier adaptation for 3D object categorization
A problem with these classical methods of object classification is that they work accurately on the data they are trained with but their performance decreases significantly when the classifier is tested in a different domain. We refer to a domain to extract data of a certain type, from a certain source, or generated in a certain period in time. For example, we can train a classifier using a dataset which contains a large number of labelled samples, but in the prediction phase, the samples are captured using a differ- ent device, leading to an unequal distribution from those samples used for training the classifier.
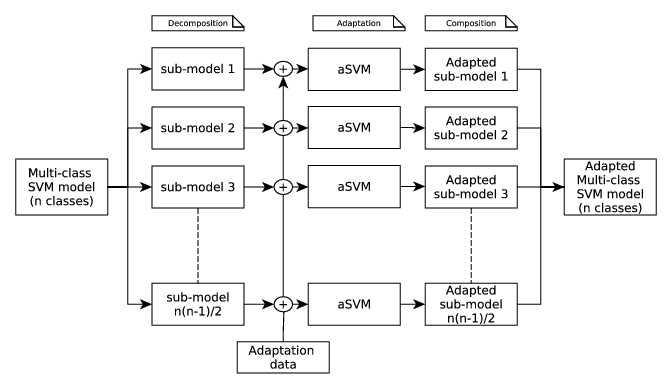
We consider this a domain change problem in object classifiers where a classifier adaptation can be applied. This classifier adaptation aims to build a classifier that is robust to the mismatched distributions between the training and testing samples. Some classifier adaptation approaches have been presented but little work has been done on understanding the effects of the domain change on RGB-D data. The Adaptive Support Vector Machines algorithm presented was developed for domain adaptation on binary classifiers, unlike our classifiers which are trained for a multiclass classification problem. To solve this issue, the libSVM file models are decomposed into sub-models, where each sub-model represents a binary classifier. This decomposition can be performed taking into account the grouping rules of libSVM.

Contextual modeling for object recognition
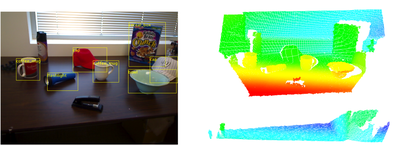
In natural environments, different object categories usually co-occur (like car and pedestrian). Hence, when recognizing a particular object, not only the features extracted from that object are useful, but also identities of other objects visible in the scene might be informative. For example, one might often find a keyboard and a mouse next to a computer monitor; thus, these objects are often co-occurring, thereby jointly constituting an object-to-object context. One way of incorporating information about possibly noisy identities of other objects in the scene is to jointly optimize the identities of all detected objects using object classifier’s ranked or probabilistic beliefs about them. We use Markov Random Field (MRF) model to take into consideration natural or expected cooccurrences of different objects to refine the results of object category classifier. Moreover, we investigate social media mining as a rich source for extracting natural co-occurrences of objects and analyze its transferability when used to aid scene labeling in artificially created benchmark datasets. The idea of using spatial context relies on the fact that certain objects typically occur in specific environments or are likely to be close to other specific objects. Therefore, it becomes a necessity to model these object–object relationships. Recent research efforts in computer vision focus on how contextual relationships may improve object detection and recognition—especially in indoor environments.
Selected Publications
[1] Nuricumbo, Jorge René and Ali, Haider and Marton, Zoltan Csaba and Grzegorzek, Marcin (2015) Improving object classification robustness in RGB-D using adaptive SVMs. Multimedia Tools and Applications : An International Journal, pp. 1-19. Springer US. DOI: 10.1007/s11042-015-2612-7. ISSN 1380-7501.
[2] Ali, Haider and Marton, Zoltan Csaba (2014) Evaluation of Feature Selection and Model Training Strategies for Object Category Recognition. In: IROS (ISSN: 1552-3098), 5036- 5042. International Conference on Intelligent Robots and Systems (IROS), Sept. 14–18, 2014, Chicago, Illinois. DOI: 10.1109/IROS.2014.6943278. ISSN 1552-3098.
[3] Ali, Haider and Shafait, Faisal and Giannakidou, Eirini and Vakali, Athena and Figueroa, Nadia and Varvadoukas, Theodoros and Mavridis, Nikolaos (2014) Contextual object category recognition for RGB-D scene labeling. Robotics and Autonomous Systems, 62 (2), 241 - 256. ISSN 0921-8890.