
Cognitive Robotics Department

Design of shared control skills for assistive robotics
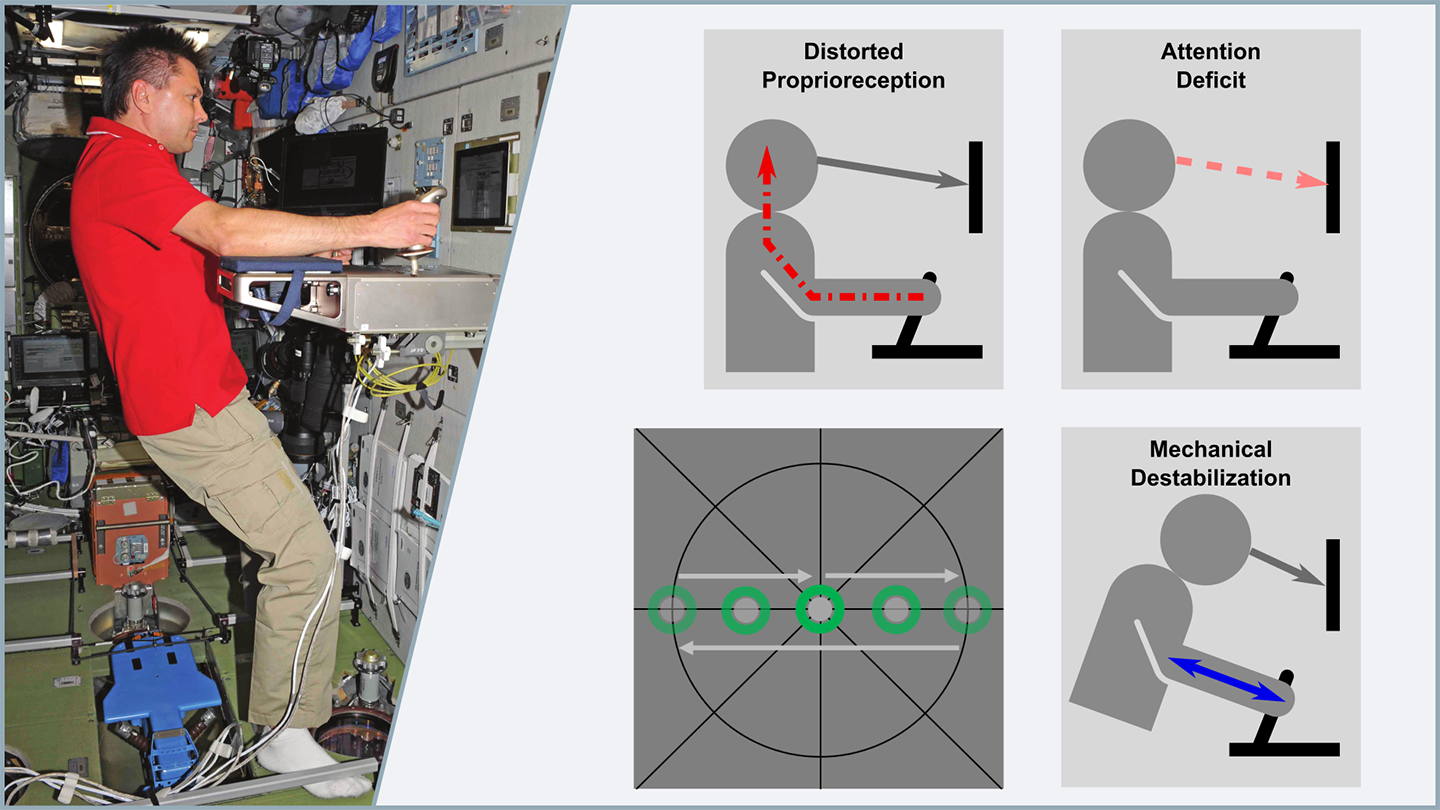
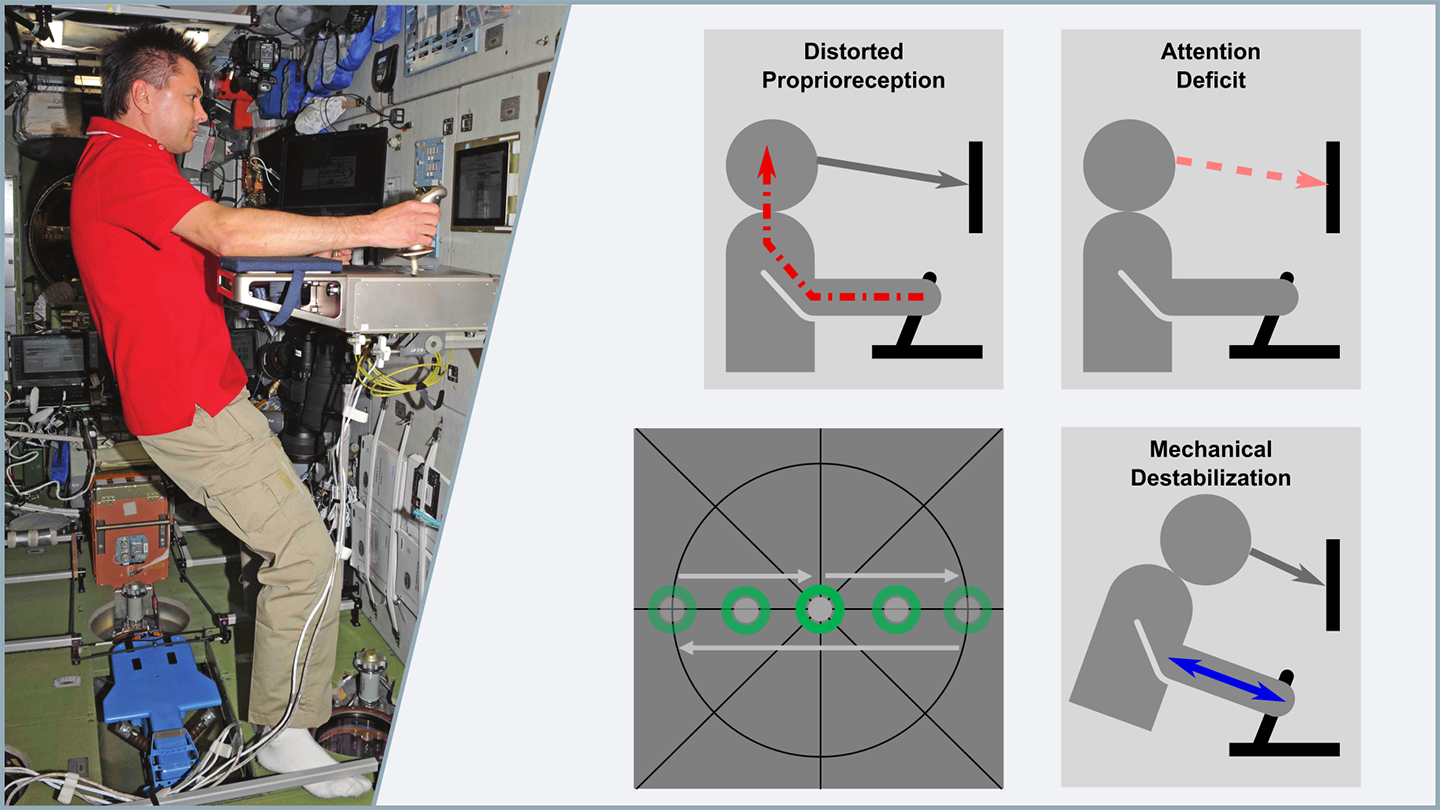
Investigation of human sensorimotor performance in weightlessness

InFuse consortium group picture
Image: 1/13, Credit:

{kind=link}
{kind=link}
Cooperation between humans and robots
On board the ISS, NASA astronaut Frank Rubio is in control of the robotics team on "Earthly Mars" at DLR in Oberpfaffenhofen. As part of the first surface avatar experiments, humans and robots had the task of retrieving a scientific instrument - here a seismograph - from the lander and placing it in the mission area.
{kind=link}
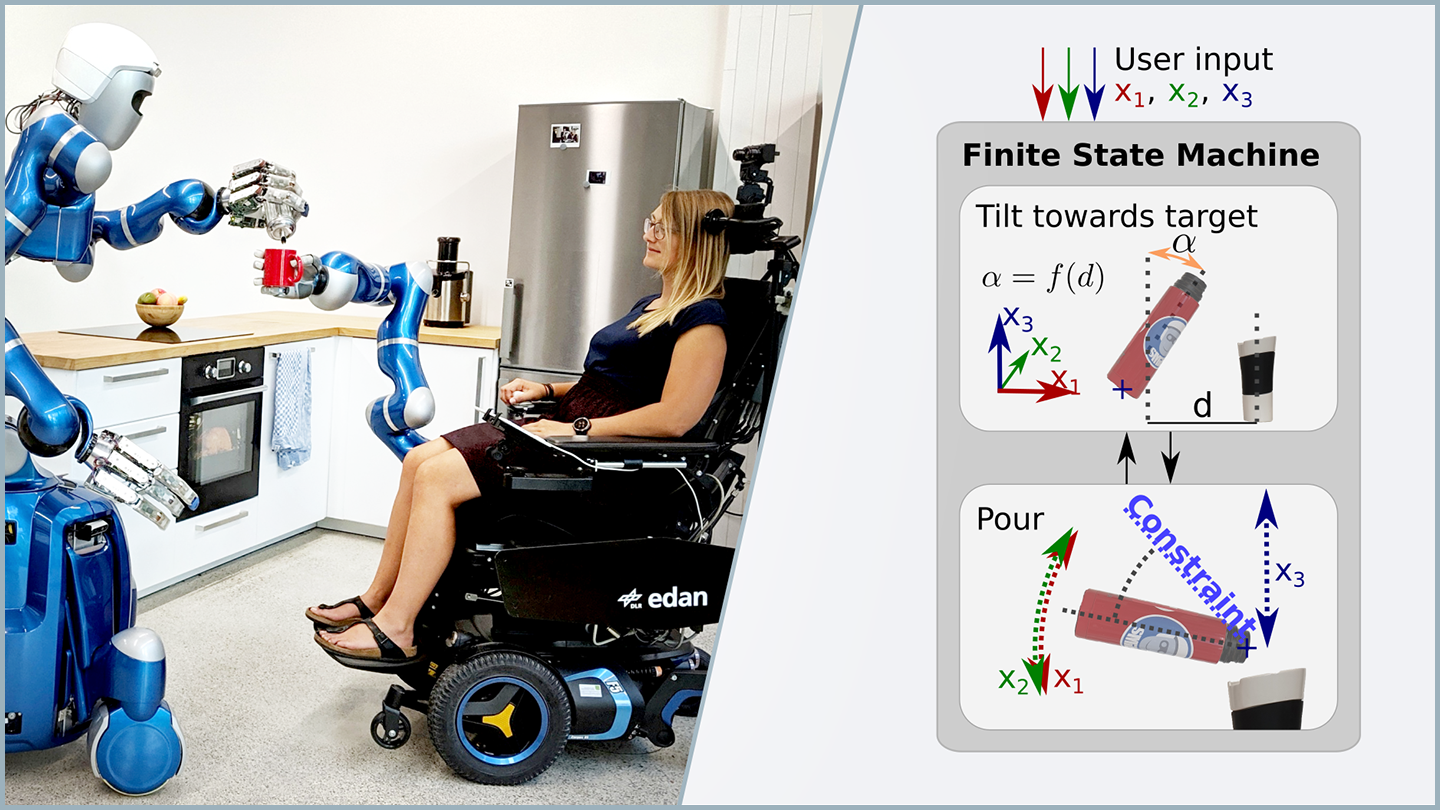
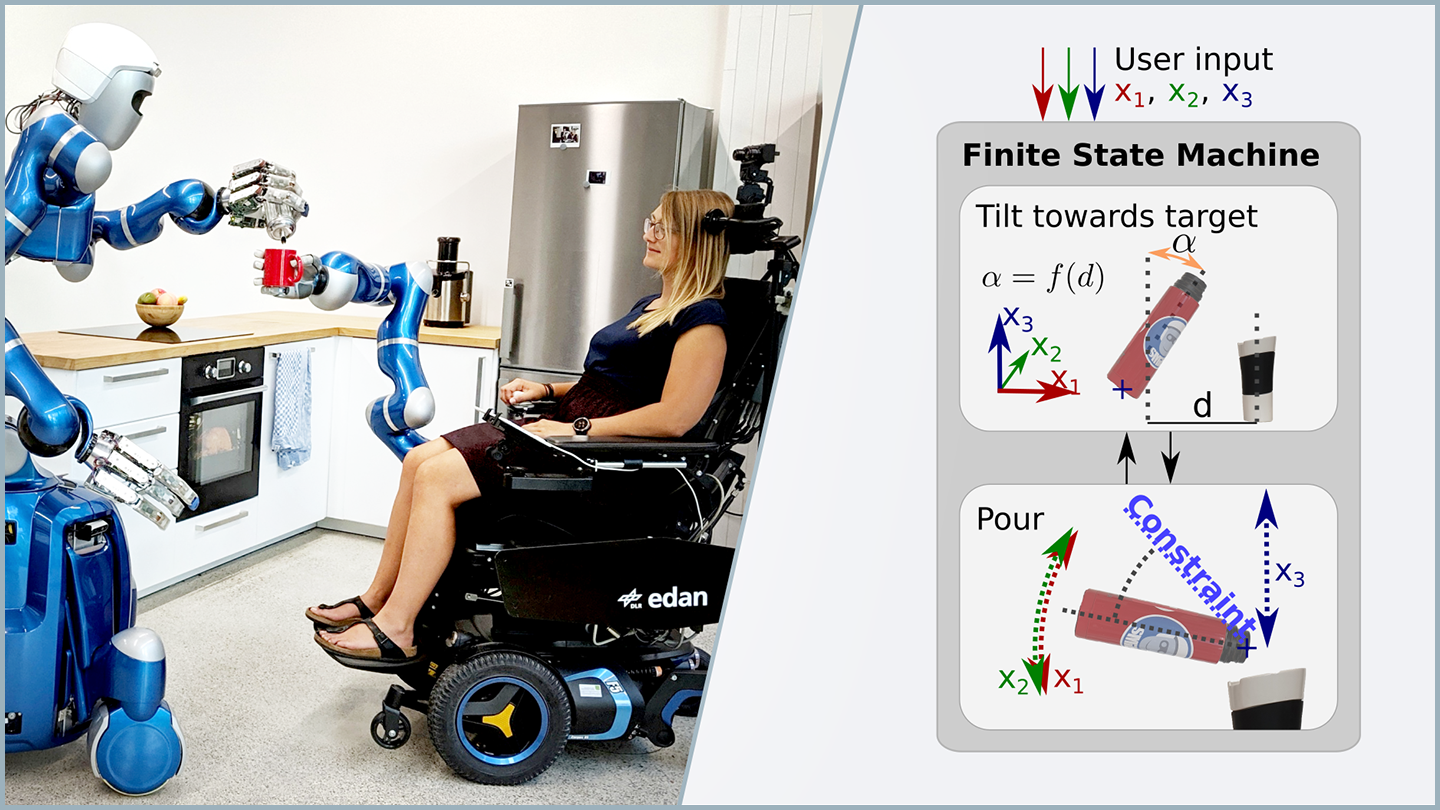
Design of shared control skills for assistive robotics
Using assistive robotic systems, people with severe motor impairments can interact with their environment again. However, the direct control of such systems is cumbersome, especially for activities that require high precision or coordinated motion. In order to facilitate the usability of assistive robots, we develop methods for semi-autonomous support. To this end, we define robot skills as finite state machines, which constrain the robot's motion in such a way that the task is successfully executed. In combination with the control interface, the user can determine which task is executed and always has control over the robot system also during task execution. With this technology, we aim to make the use of assistive robots in performing various activities of daily living easy and intuitive. (exemplary scenario with a non-disabled person).