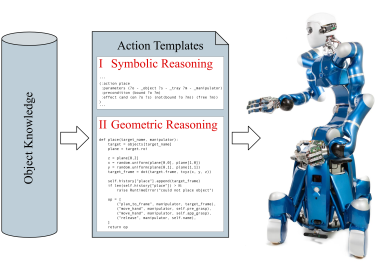
Solving arbitrary manipulation tasks is a key feature for humanoid service robots. However, especially when tasks involve handling complex mechanisms or using tools, a generic action description is hard to define. Different objects require different handling methods. Therefore, a modular system architecture has been developed to autonomously solve manipulation tasks from the object point of view.
Object knowledge is used to parameterize the hybrid reasoning procedure.
Daniel Leidner, Christoph Borst, and Gerd Hirzinger, "Things Are Made for What They Are: Solving Manipulation Tasks by Using Functional Object Classes",in Proc. of the IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, November 2012, pp. 429–435.
Contact
Daniel Leidner
Institute of Robotics and Mechatronics
Cognitive Robotics
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling