
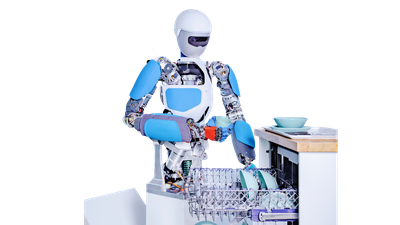
David
Size: | Adult human |
Weight: | approx. 55 kg |
Degrees of freedom: | 44 |
Actuation: | 83 brushless DC motors |
Sensors: | 173 position sensors |
Speed: | Comparable to humans |
Working space: | Comparable to humans |
Features: |
|


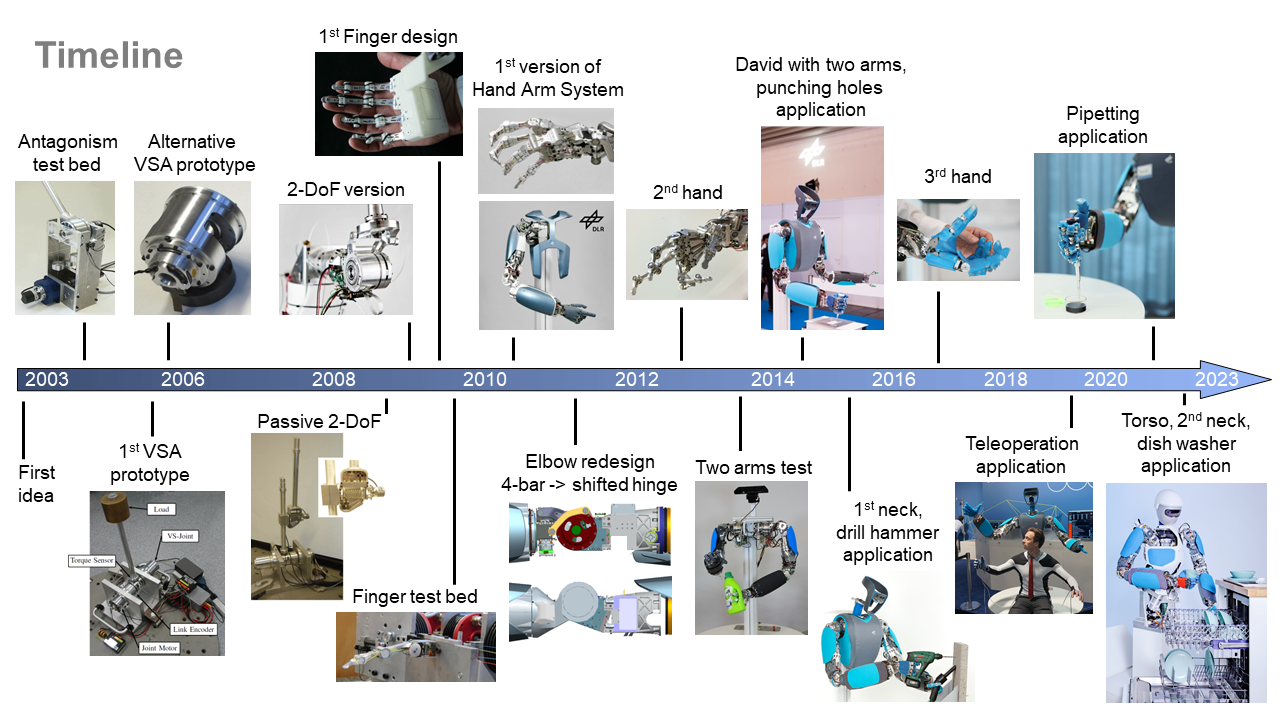

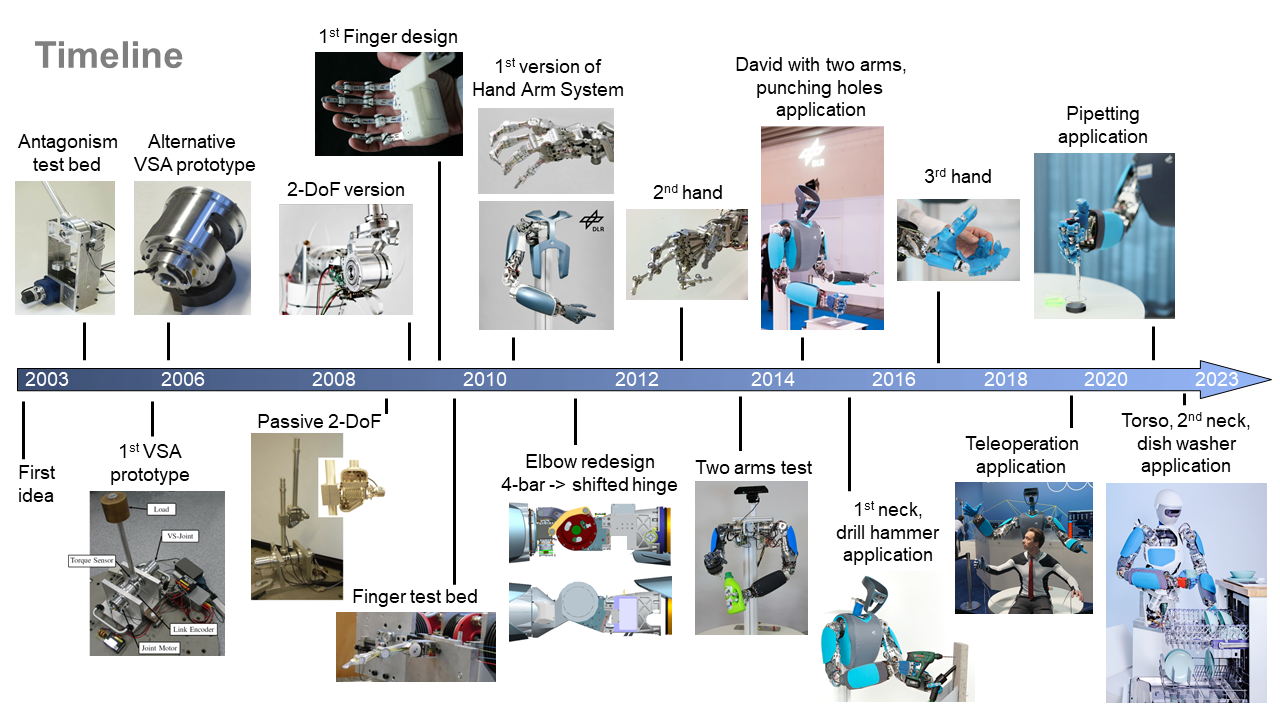
The development of David
David in the form of a full humanoid upper body is a result of research and consequent development. It started from the first ideas of variable stiffness actuators and continued with prototypes, multiple generations of hands and body components. Keeping our long term vision of a dexterous and robust service robot in mind, our focus changed from technological basics to skills and finally applications.
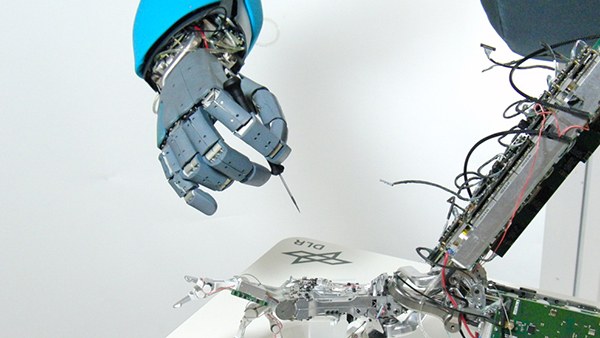
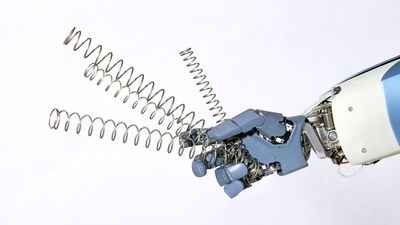
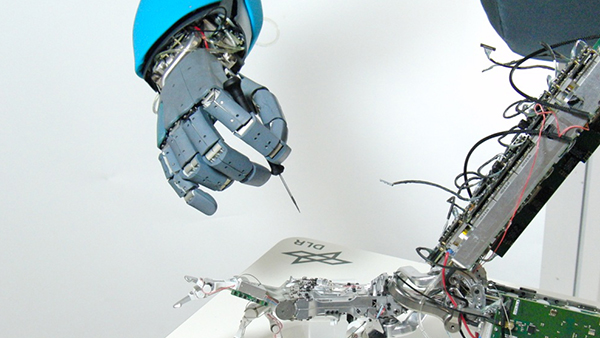
David AWIWI hand
Fünf-Finger-Hand mit hoher Geschicklichkeit und Feinmotorik.
{kind=link}
{kind=link}
{kind=link}
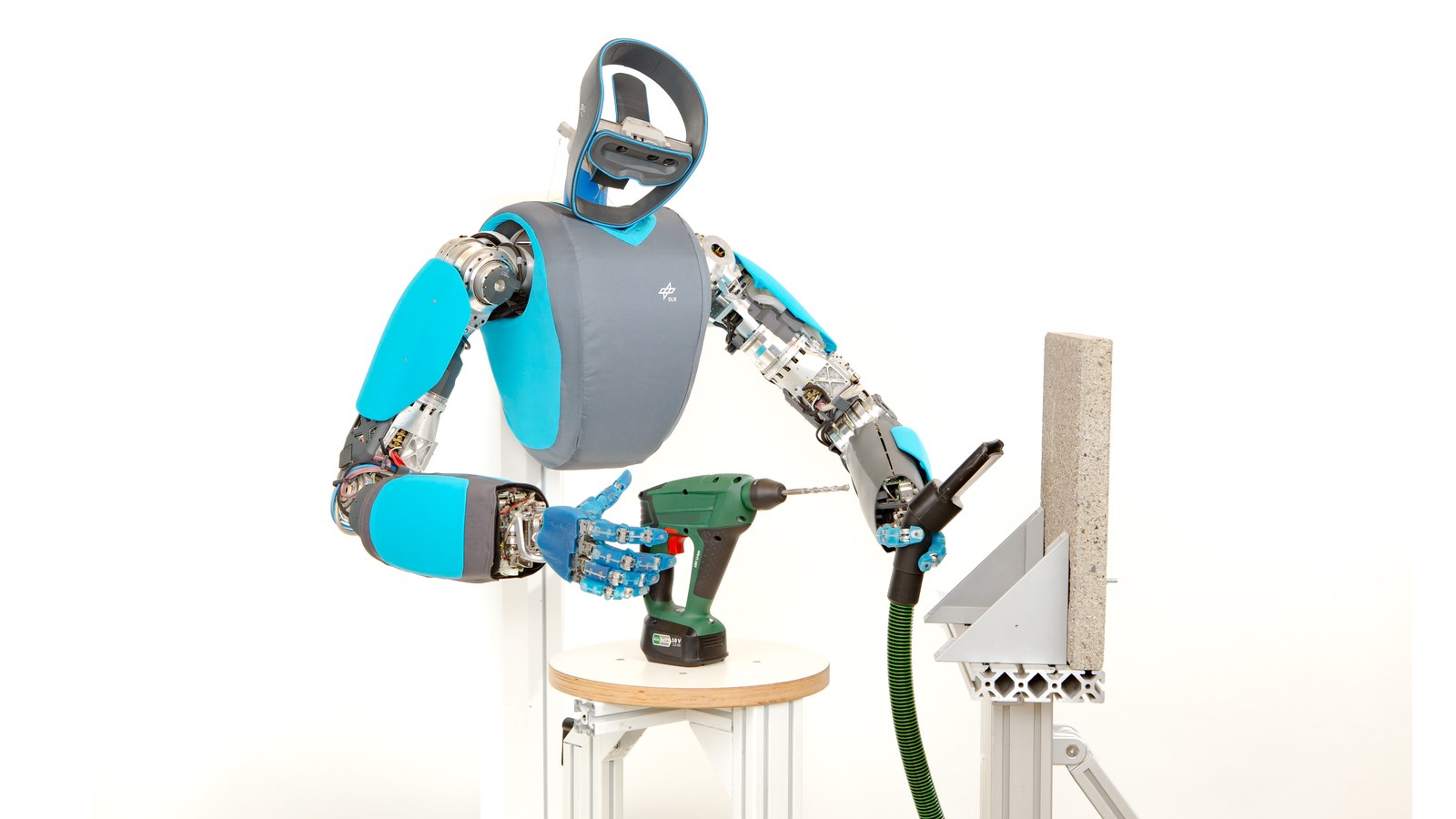
David drills a hole in concrete
The humanoid robot David autonomously uses an impact drill and a vacuum cleaner to drill a hole in a concrete slab.
{kind=link}