
3D Modeler (2006–2017)


Technical data
Size: | 17 cm × 20 cm × 11 cm |
Weight: | 850 g |
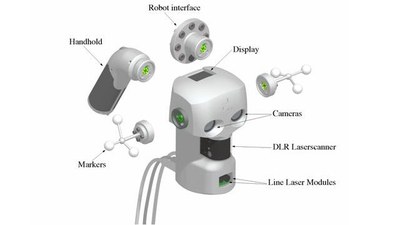
Sensors: |
|
Communication: | Ethernet over FireWire |
Workspace: |
|
Special features: |
|
Size: | 17 cm × 20 cm × 11 cm |
Weight: | 850 g |
Sensors: |
|
Communication: | Ethernet over FireWire |
Workspace: |
|
Special features: |
|


{kind=link}