The MICA is a versatile instrument for minimally invasive robotic surgery. Being a 3DoF-robot, it is attached to the MIRO arm and extends the kinematic chain by three joints. In 2010 the MICA was presented to the public for the first time.
Cartesian position control at 3 kHz, Motor control at 96 kHz
System description
The DLR MICA is the second generation of versatile instruments for minimally invasive surgery developed at the Institute of Robotics and Mechatronics. For minimally invasive procedures in the context of the MiroSurge scenario those robotic instruments are coupled to a MIRO robot arm. Thus the MICA extends the telemanipulator by the joints 8, 9 and 10. A MICA consists of a drive unit and a task-specific tool with tool interface, shaft and end effector.
Various tools targeted at different surgical applications can be used with the MICA drive unit, differing in the number of DoFs, functionality of the end effector, and range of motion. Propulsion for the tool is provided by means of 3 linear motions transmitted through a tool interface between drive unit and tool. The tool interface provides suitable propulsion scaling for the tool as well as standardized digital communication with any sensors located in the tool, such as the DLR force/torque sensor. In the present configuration the tool is comprised of a 2 DoF wrist, gripper and 7 DoF force/torque sensor, providing dexterous manipulation and haptic feedback from the operation site. However, tools range from grippers over scissors to needle holders in minimally invasive surgery.
The versatile design approach followed for the MIRO and conformance to the MiroSurge setup outline a number of requirements for the instrument design:
Clear separation between the robotic platform and the instrument: The MIRO robot provides a single mechanic interface to any instrument. Still, quick instrument changes have to be possible during surgical procedures. This requires the MICA drive unit to contain all necessary motors, power, communication, motor control, and sensor signal conditioning electronics.
Lightweight design: Weight saving at the instrument improves the dynamic properties of the robot arm and permits the application of higher manipulation forces.
Small size of the drive unit, particularly in diameter: Multiple robotic arms will be working in close proximity around the operating table. Interference and collisions of instruments have to be avoided.
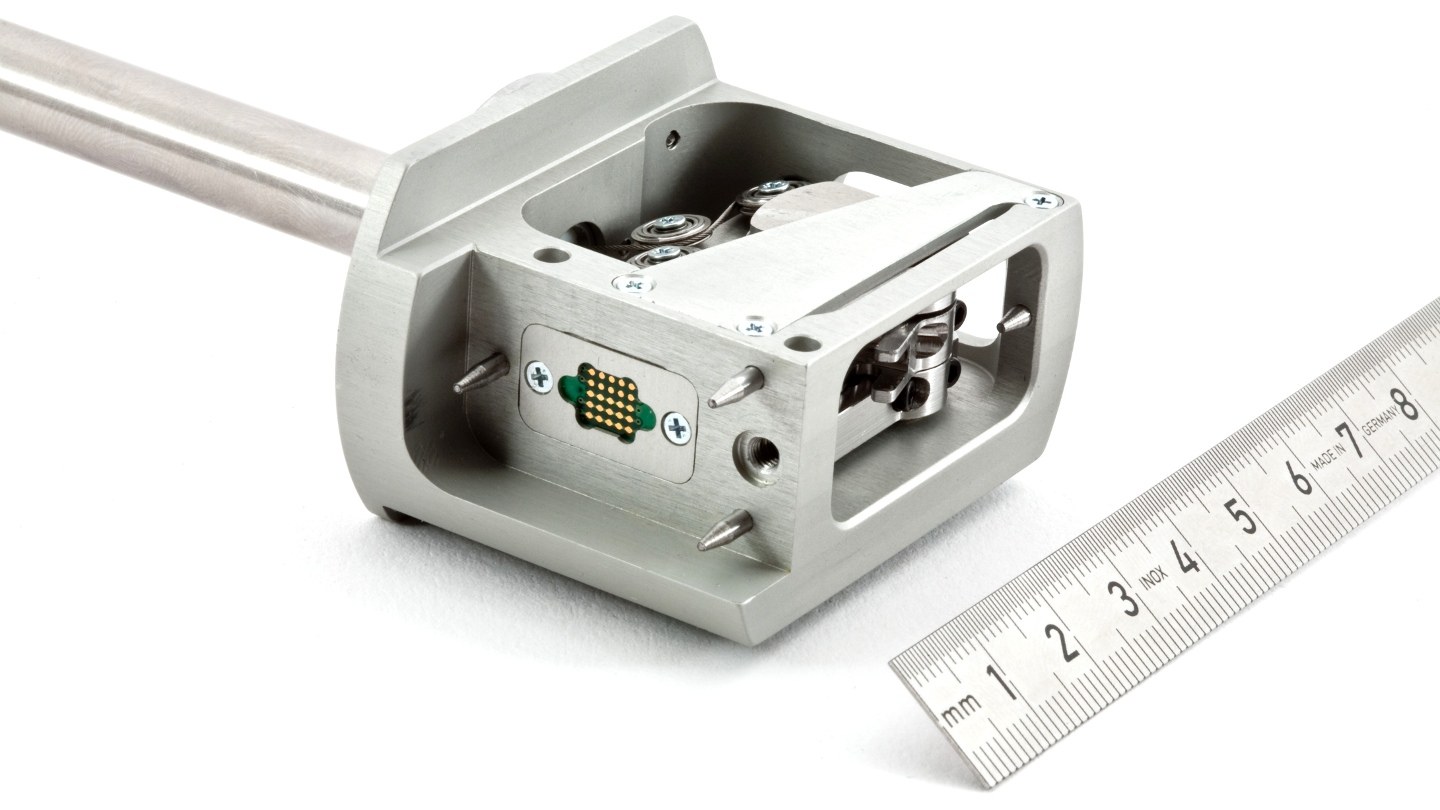
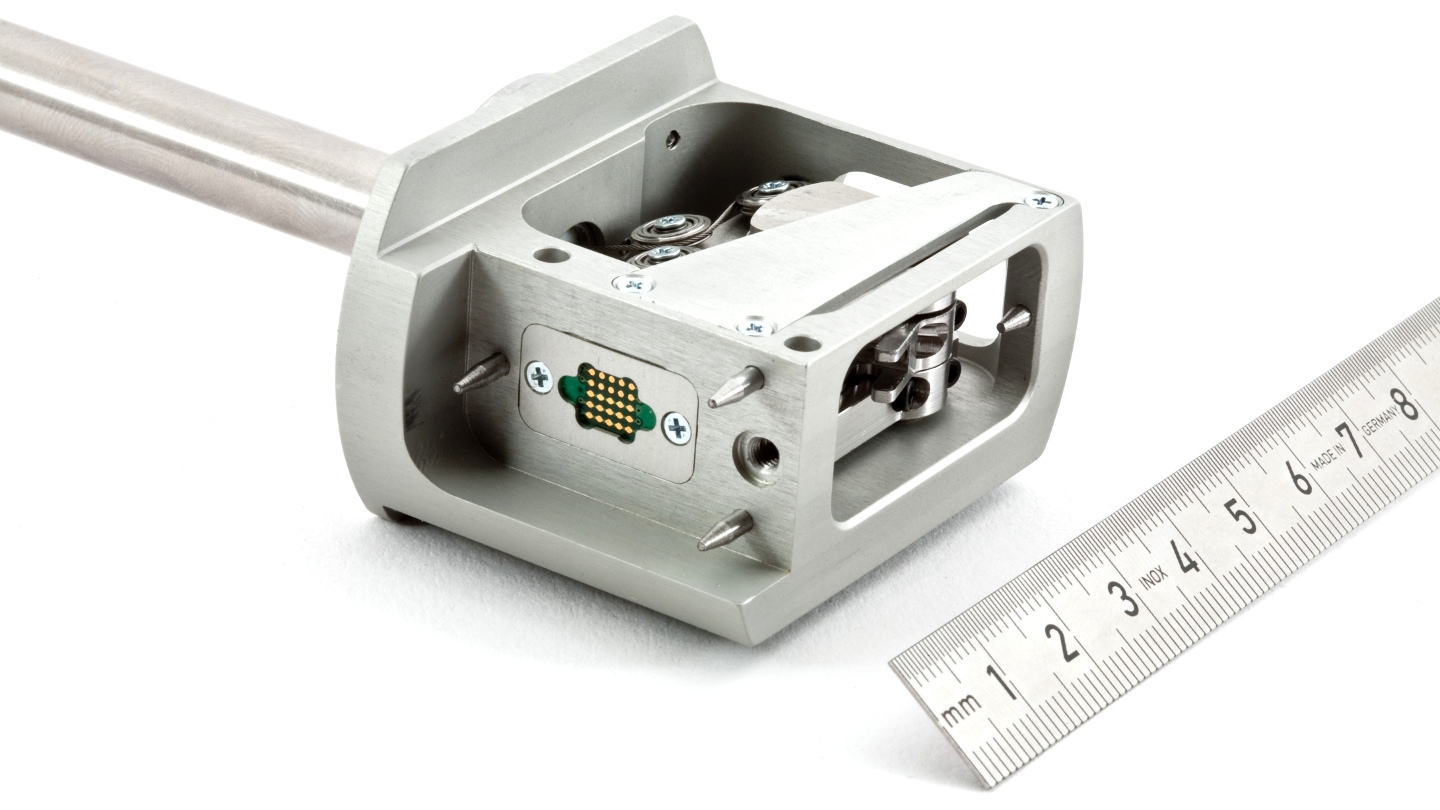
Total view of the DLR MICA
Gesamtansicht einer DLR MICA mit aufgabenspezifischem Werkzeug (links) und universell einsetzbarer Antriebseinheit (rechts).
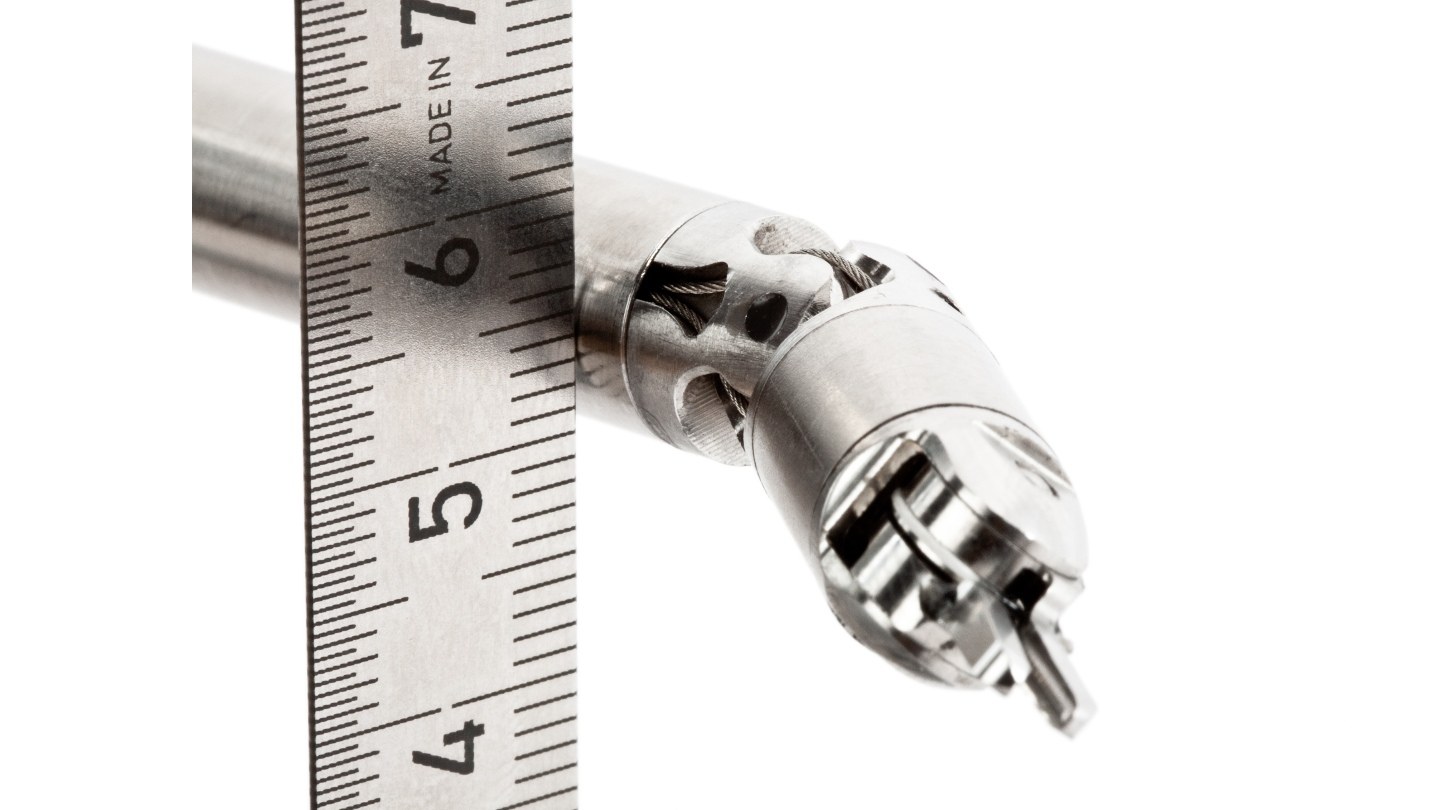
Umlenkeinheit des Werkzeuges mit Maßstab: Hier wird die Translationsbewegung der drei Freiheitsgrade der Antriebseinheit in Drahtseilbewegungen umgesetzt, um die Handgelenksfreiheitsgrade und den Endeffektorfreiheitsgrad des Werkzeugs zu bewegen.
Thielmann et al., "MICA - A new generation of versatile instruments in robotic surgery" in Proc. of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, October 2010, pp. 871-878.
Seibold et al., "Endoscopic 3 DoF-Instrument with 7 DoF Force/Torque Feedback", workshop contribution presented at ICRA 2009, Kobe, Japan, May 2009.
Seibold et al., "Prototypic force feedback instrument for minimally invasive robotic surgery", in Medical Robotics, Vienna, Austria, I-Tech Education and Publishing, pp. 377–400, 2008.
Kübler et al., "Prototypic setup of a surgical forced feedback instrument for minimally invasive robotic surgery", in Extended abstract and lecture, CURAC 2006, Hannover, Germany, October 2006.
Kübler et al., "Development of actuated and sensor integrated forceps for minimally invasive robotic surgery", The International Journal of Medical Robotics and Computer Assisted Surgery, vol. 1, no. 3, pp. 96–107, April 2005.




{kind=link}
{kind=link}
{kind=link}