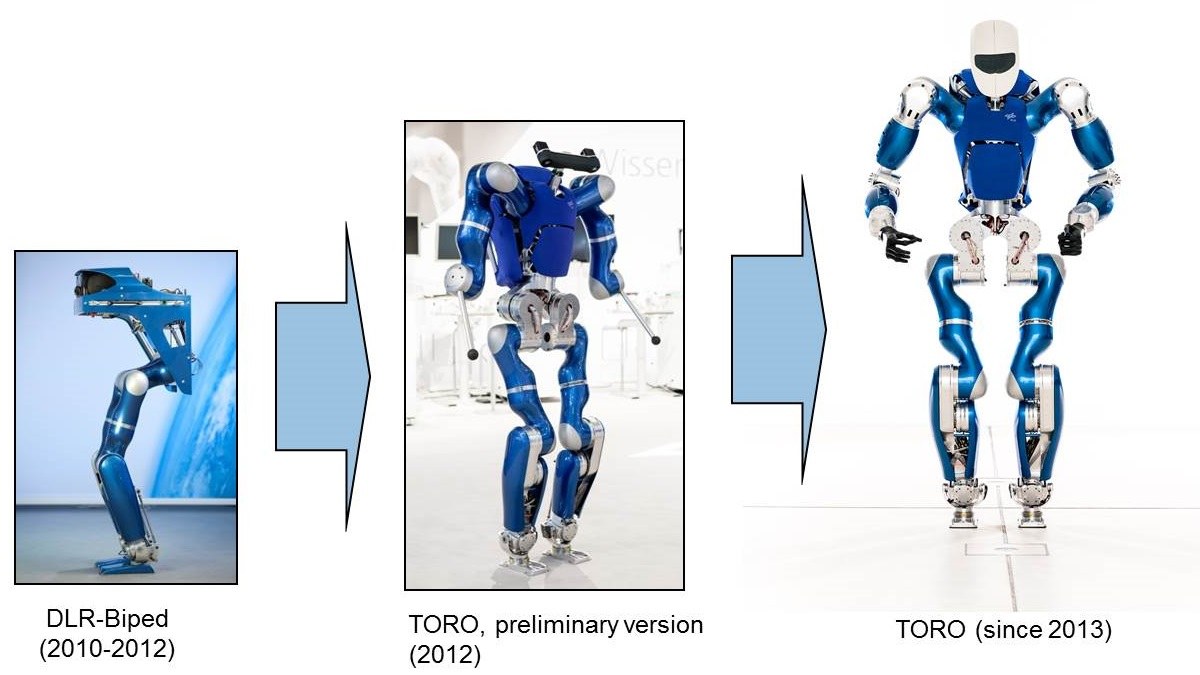
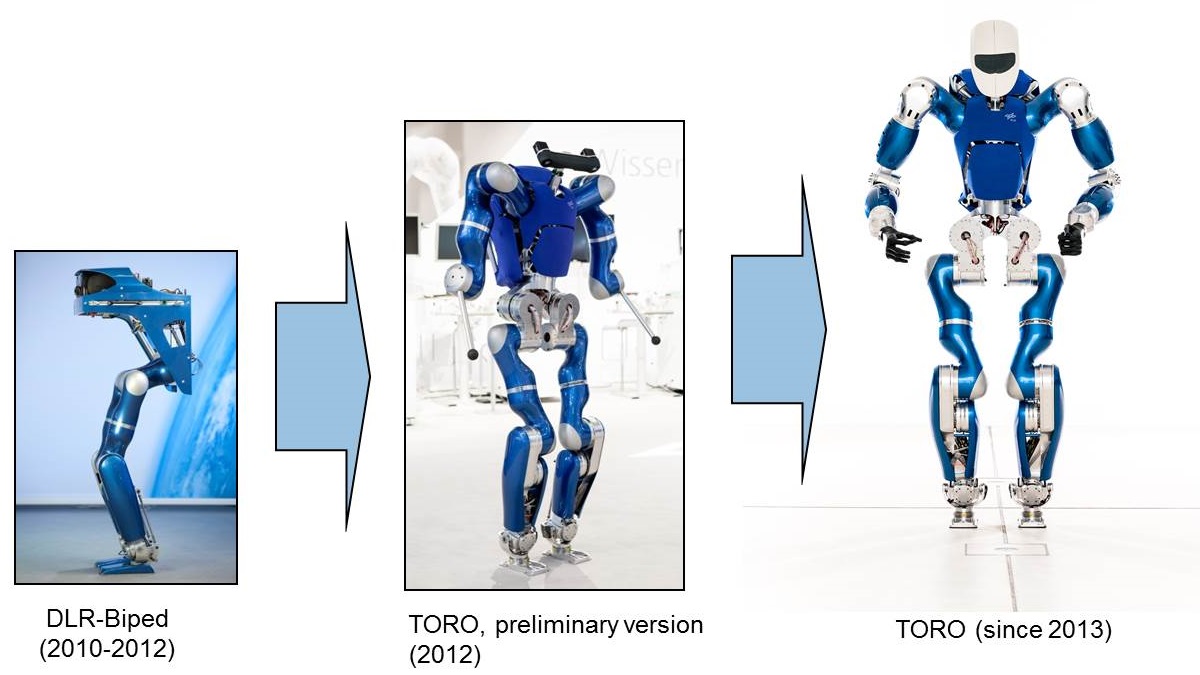
The humanoid walking robot TORO (TOrque-controlled humanoid RObot) is a research platform for scientific topics dealing with bipedal movement and dynamics. This includes things such as robust walking, climbing stairs and multi-contact scenarios. In 2013 TORO was presented to the public for the first time.
The humanoid robot TORO is being used to research the basic problem of equilibrium. Algorithms for robust walking and balancing as well as for multi-contact controls are being developed. TORO, like its big brother Rollin’ Justin, is based on lightweight robotic technology. In almost all of its joints, TORO can actively control torques so that the stiff robot can be artificially flexible depending on the active controller. Unlike position-controlled robots, this flexibility promises a greater degree of safety when interacting with people, as well as greater robustness in contact with the environment.
TORO offers the possibility to compare position- and torque-based control concepts. It compares impedance-based, inverse-dynamic control concepts in the field of whole-body control.
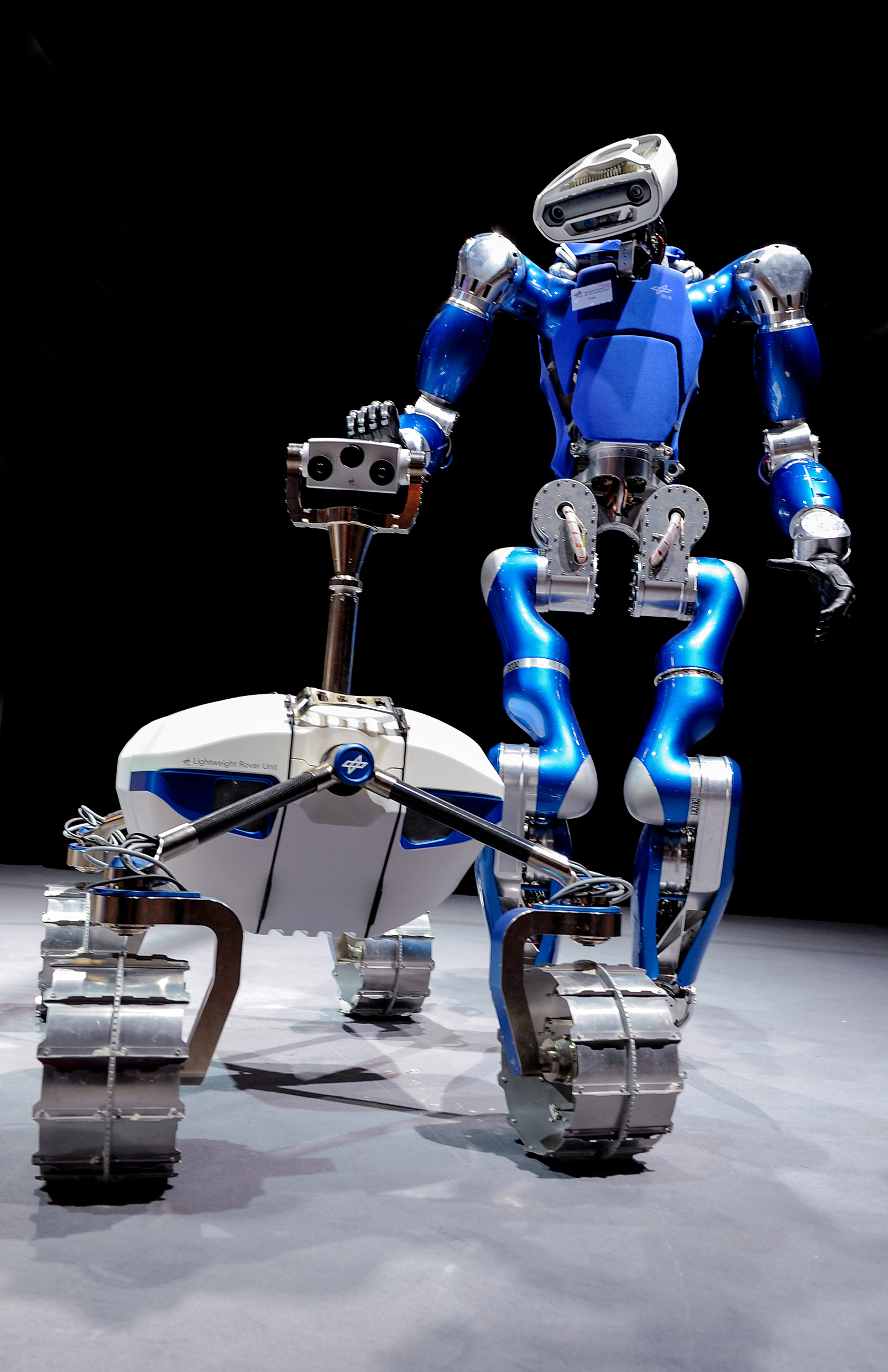
LRU and Toro at the ILA in 2014
The Institute of Robotics and Mechatronics presented the LRU rover and the walking robot TORO at the 2014 ILA.
The shape of TORO was modeled on that of humans. Torque sensors in almost all joints allow the system to feel, for example, collisions or interaction forces with its surroundings and to respond accordingly safely and flexibly.
Bernd Henze, Alexander Dietrich, Máximo A. Roa, and Christian Ott: “Multi-Contact Balancing of Humanoid Robots in Confined Spaces: Utilizing Knee Contacts”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 679–704, 2017. [elib]
Bernd Henze, Alexander Dietrich, Christian Ott: "An Approach to Combine Balancing with Hierarchical Whole-Body Control for Legged Humanoid Robots”, IEEE Robotics and Automation Letters (RA-L), vol. 1, no. 2, pp. 700–707, 2016. [elib]
Bernd Henze, Máximo A. Roa, Christian Ott: "Passivity-Based Whole-Body Balancing for Torque-Controlled Humanoid Robots in Multi-Contact Scenarios”, The International Journal of Robotic Research, vol. 35, no. 2, pp. 1522–1543, 2016. [elib]
Englsberger et al., "Overview of the torque-controlled humanoid robot TORO", in Proc. of the 2014 IEEE/RAS International Conference on Humanoid Robots (HUMANOIDS), Madrid, Spain, pp. 916-923, November 2014. [elib]





{kind=link}
{kind=link}
{kind=link}
{kind=link}