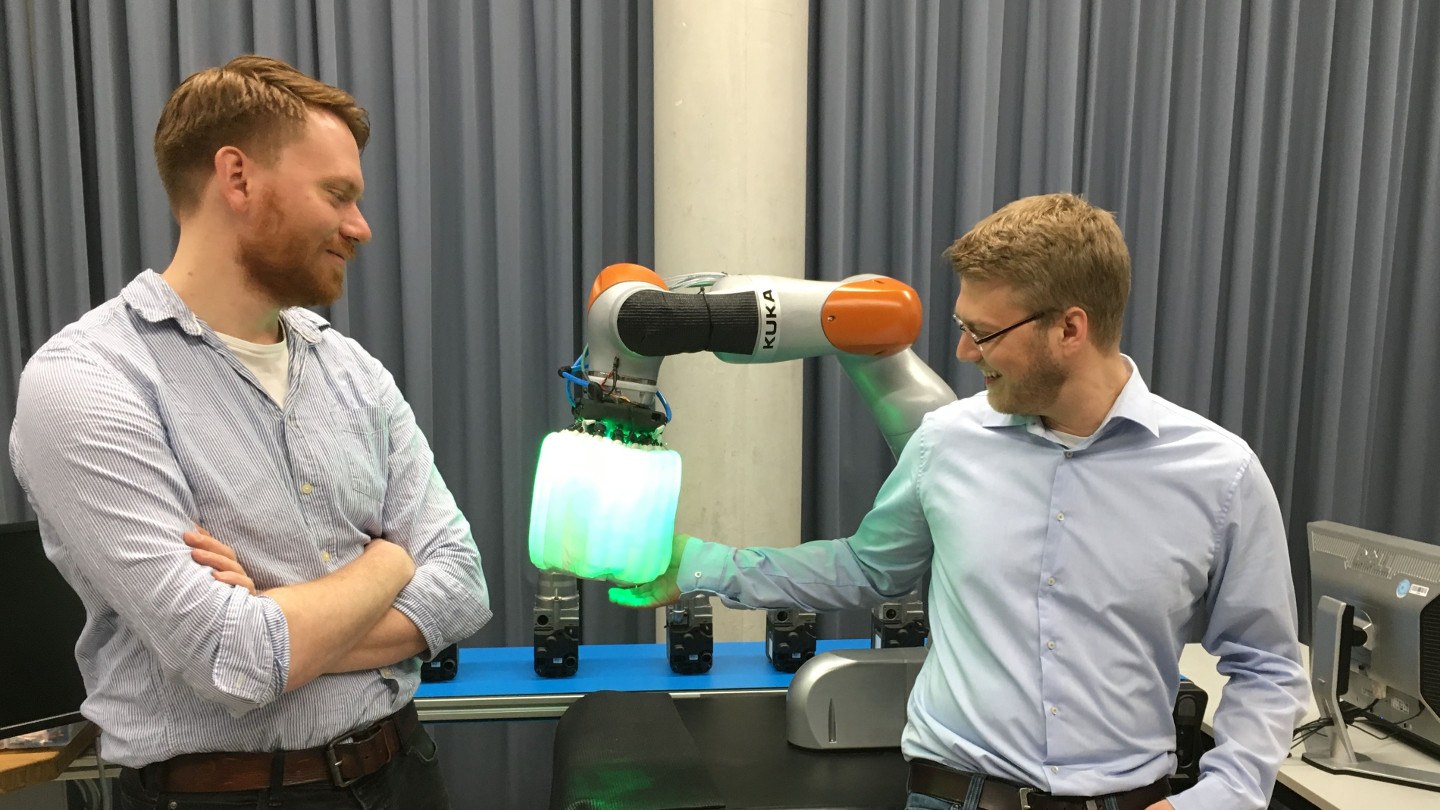
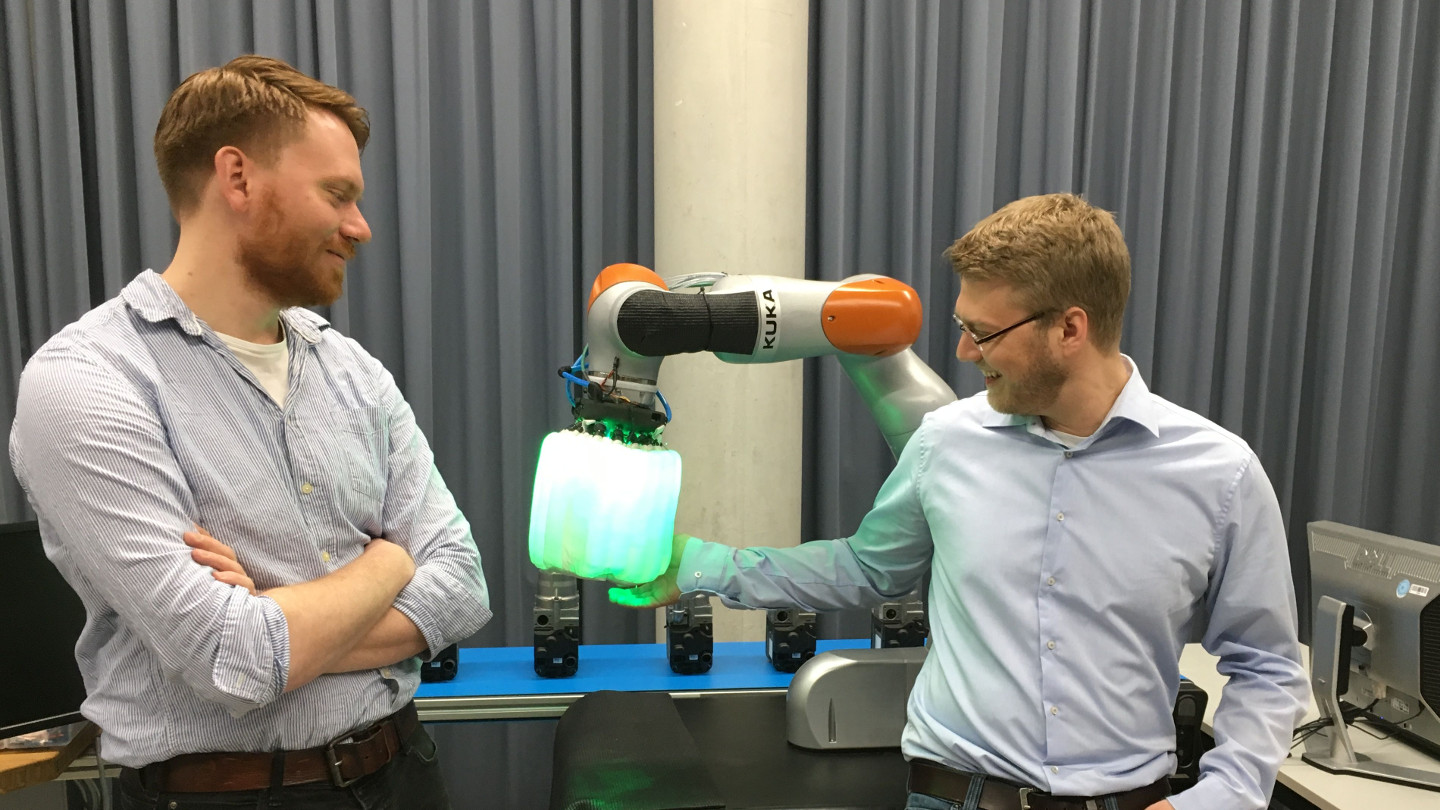
While more and more new types of robots are available for human-robot collaboration (HRC), sharp-edged robot tools and components continue to pose a major threat of possible injuries in the case of a human-machine collision. To solve this problem, we designed an airbag that enables HRC for a wide range of robot tools and objects without limiting the function of the overall robotic system. For this purpose, the safety module covers the tool and object with an airbag always before the robot starts an unsafe and fast motion, and then releases both of them. This enables a reduction of cycle times and significantly increases productivity.
In 2016, the airbag was introduced to the public for the first time at the Automatica 2016.
Technical Data
Size:
300 mm x Ø180 mm
Weight:
approx. 0.5 kg
Inflation time:
< 0.5 s
Deflation time:
< 0.8 s
Possible min. radii tool/component:
0.2 mm
Possible robot speed LBR4+ for HRC (ISO/TS 15066) with 2-finger Robotiq gripper:
1 m/s
Energy supply:
t.b.d.
Features:
• Absorption of collisions • Intrinsic safety • Pressure sensors to monitor collisions • Fast inflation and deflation times • Compressed air supply
System description
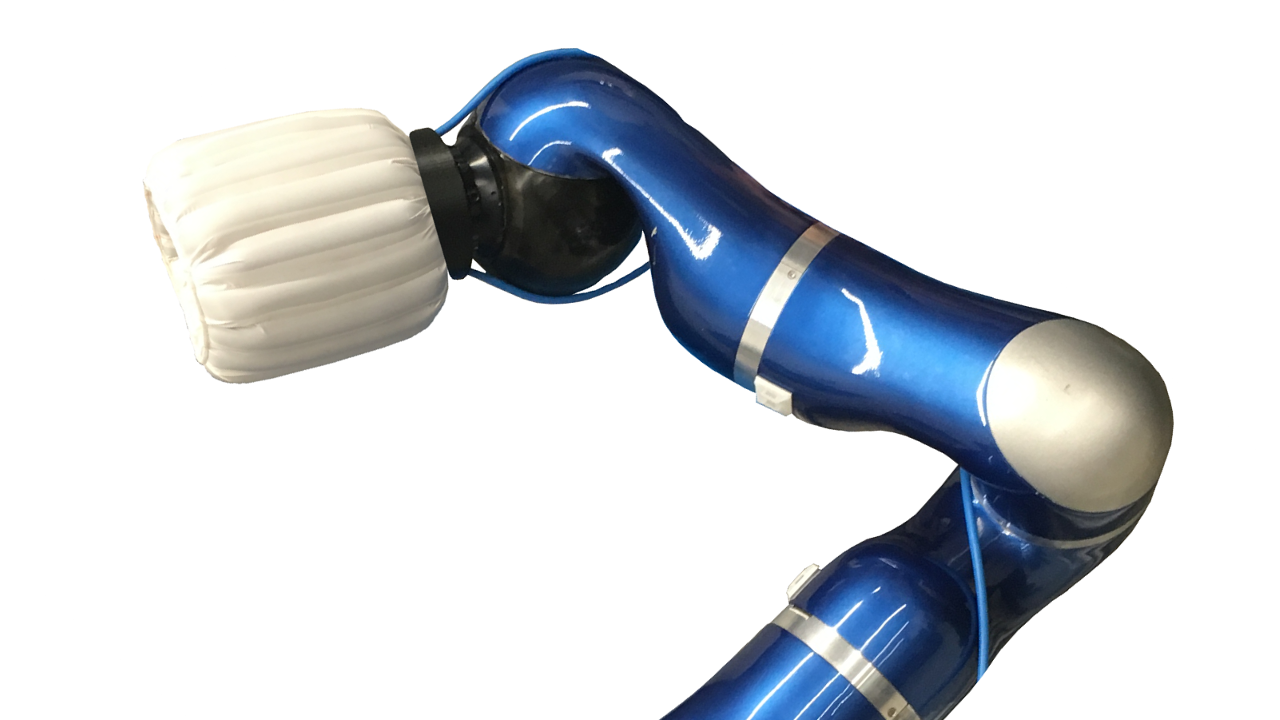
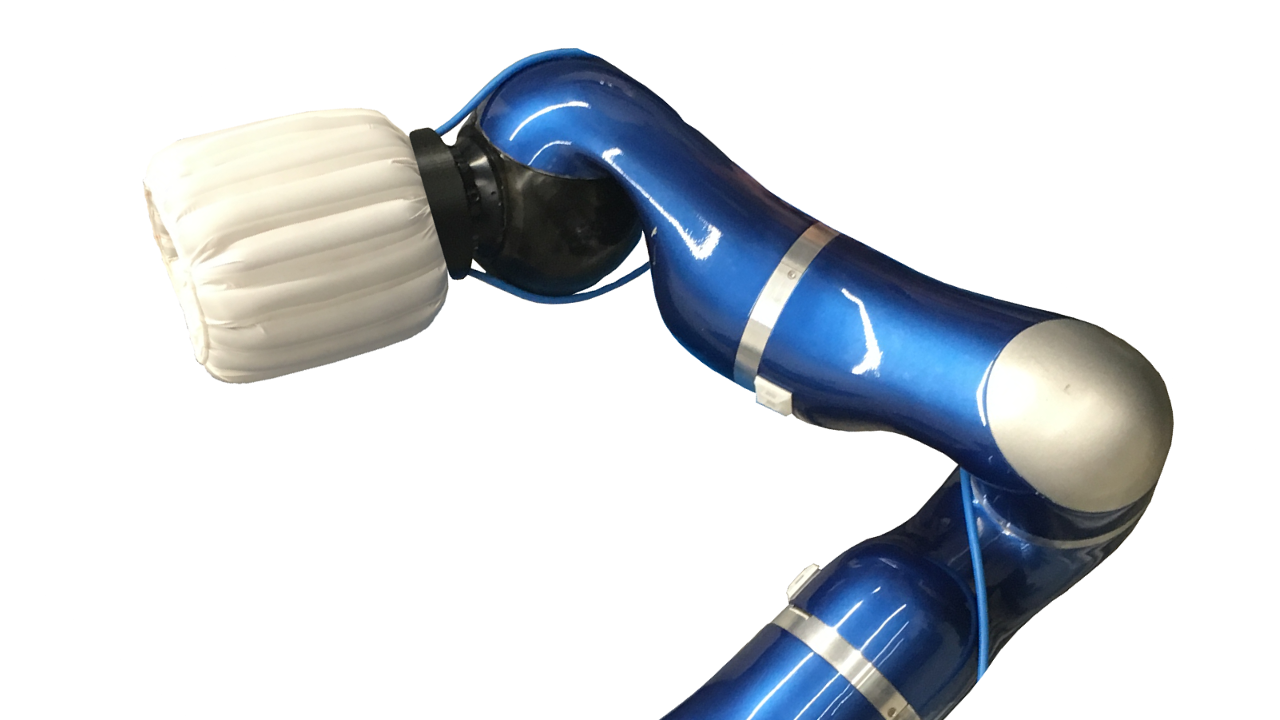
The technology consists of a safety module for robot tools and components to ensure safety requirements according to ISO/TS 15066 in HRC applications. It consists of a valve flange, which is attached between any robot and robot tool and is used for the control of compressed air, an airbag attached to the flange and a control box that communicates with the safety control of the robot. The airbag is filled with compressed air and covers the tool and object in such a way that an air cushion is surrounding both components. Deflating the airbag frees the tool and the object and restores full functionality of the tool.
Two integrated pressure sensors are used to ensure proper operation and enable the detection of a collision. To demonstrate the functionality and the safety requirements according to ISO/TS 15066 (HRC safety requirements) by the safety module, experiments with a crash test dummy were carried out. The evaluation of the force and pressure measurements during a collision between the dummy and the robot showed that a motion with a standard industrial gripper could not be approved without the airbag. By using the safety module it is possible to move the robot with a velocity of 1 m/s without exceeding the limits of the HRC safety requirement (ISO/TS 15066) with regard to permissible force and surface pressure. As a result, low cycle times are enabled, thus making economical application of HRC robots at all possible.
KUKA Innovation Award 2017
The Airbag won the KUKA Innovation Award at the Hannover Messe 2017.
Airbag for robotic end effectors for safe human-robot collaboration
Industrie 4.0 requires the use of fenceless robotic systems for safe human-robot collaboration (HRC) in production and is a current focus in robotics. While more and more new types of robots can be used directly for HRC, robot tools as well as objects continue to pose a major threat of possible injuries in case of a human-machine collision. To address this problem, we designed a safety module that enables HRC for a wide range of robot tools and components without limiting the function of the overall robotic system. For this purpose, the safety module constantly covers the tool and object with an airbag when the robot moves and then releases both of them by deflating the airbag. This reduces production cycle times and significantly increases productivity.




{kind=link}
{kind=link}
{kind=link}