
LWR III

Size: | Maximum reach 936 mm |
Weight: | 14 kg |
Degrees of freedom: | 7 (R - P - R - P - R - P - P) |
Maximum Payload: | 14 kg |
Max. joint speed: | 120°/s |
Control modes: | Position-, Torque-, Impedance Control |
Specifics: |
|
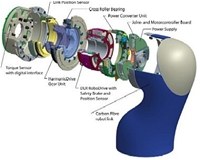

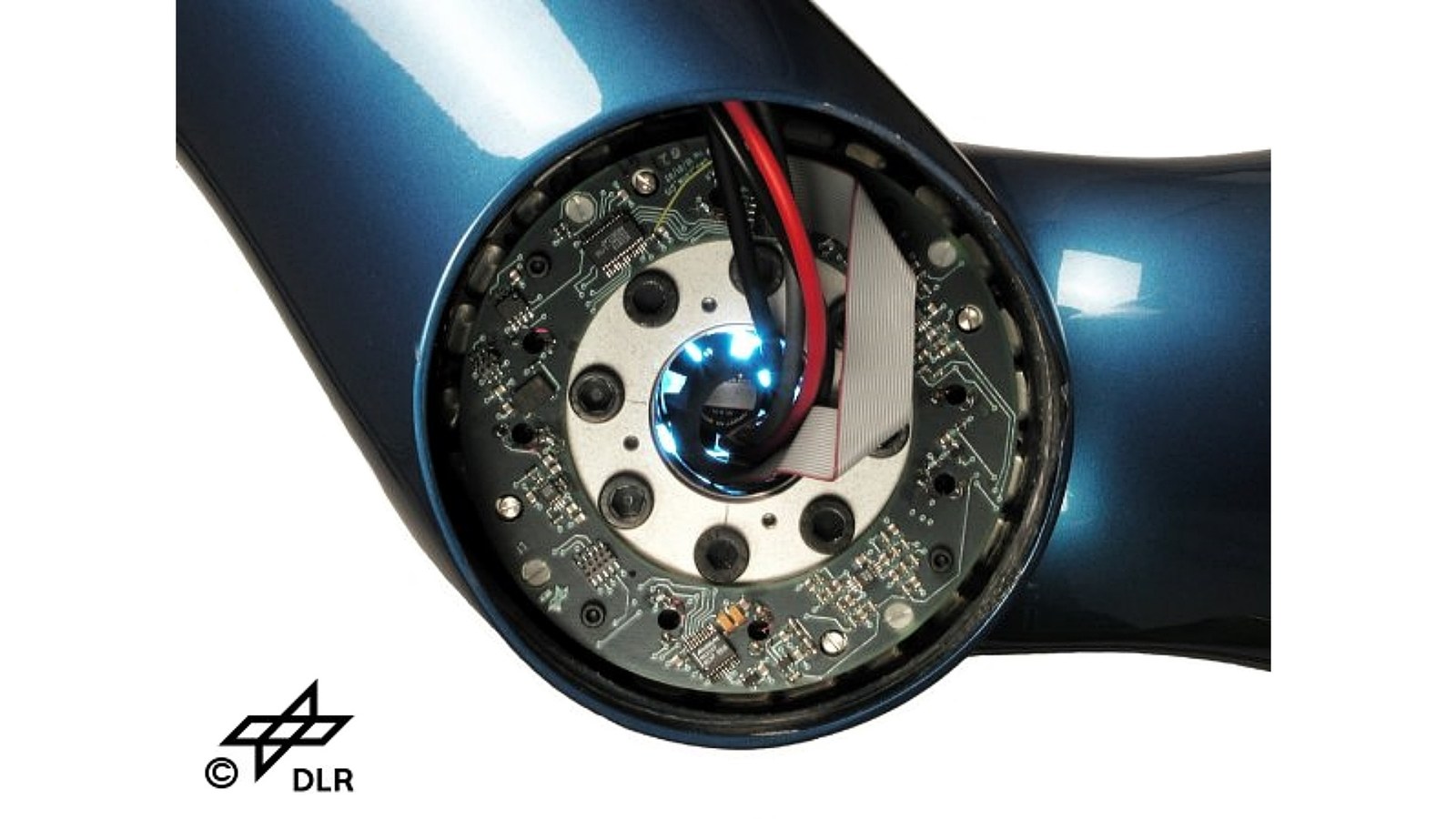

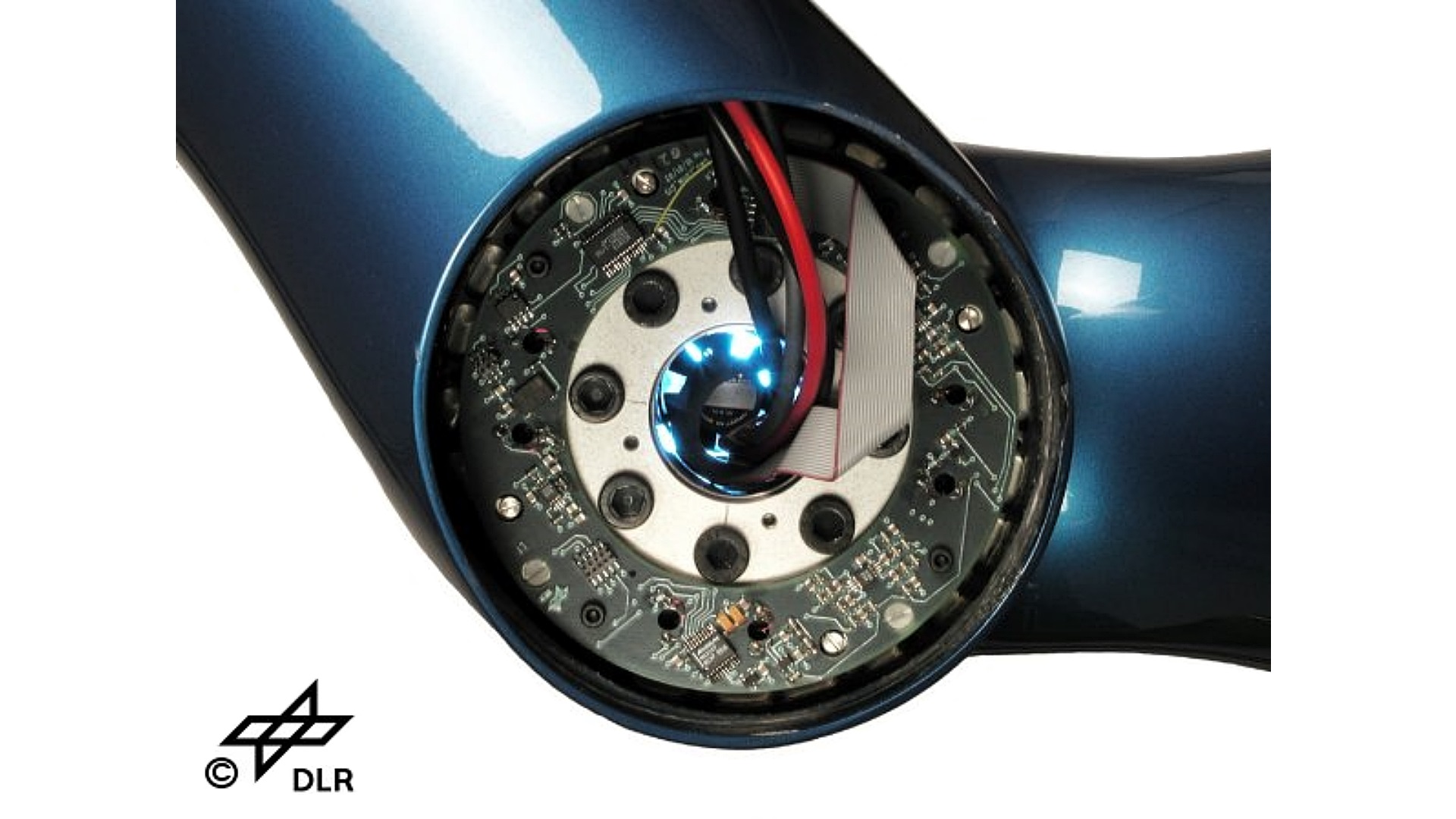
Joint of the LWR III
When the casings are removed, the compact construction of the joint modules becomes visible.

LWR III with DLR Hand II
Thanks to its tool interface, the LWR III can be equipped with various end effectors like for example the DLR Hand II.

{kind=link}
{kind=link}
{kind=link}
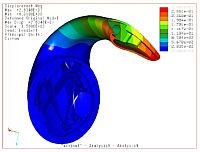
CAD Rendering of the LWR III
View of the LWR III from the right.
{kind=link}