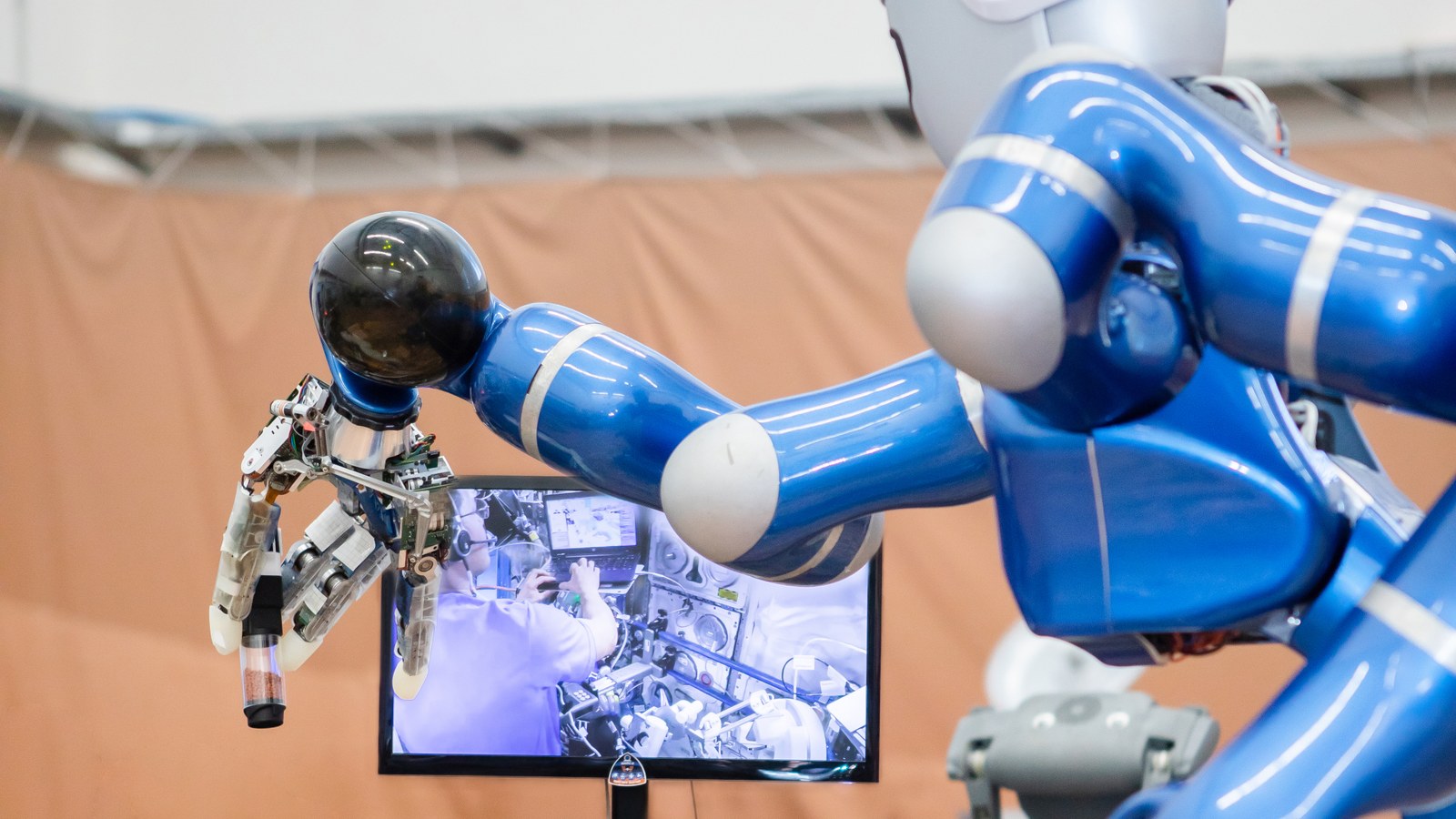
NASA astronaut Frank Rubio is in control of the robot team on board the ISS on "Earthly Mars" at DLR in Oberpfaffenhofen. The humanoid DLR robot Rollin' Justin successfully received the rock sample from the Interact Rover.
DLR-RM has a long history of space robotic missions dating back to the Rotex robotic mission on board the Space Shuttle in 1993. We have continued down this journey ever since. Robotic space assistance plays a crucial role in the human race’s ever expanding space endeavors, as sustaining human life in space remains dangerous and costly. With the aid of robots, we can greatly extend exploration range, reach hazardous locations, and cover an exponentially larger area. This is particularly critical in future colonization missions, where constructing a habitat on a large scale is required. Robotic assistance in orbital operations can also greatly ease the astronaut’s workload during extravehicular activities (EVAs) or space-walks by taking over some tasks from the human operator. In the Space Assistance domain, we consider the full spectrum of robotic operation, from immersive feedback telepresence to full autonomy.
Humanoid robots remain the most suitable systems for telepresent control by a human operator. Due to their similarity to the human form, the user can quickly and intuitively adapt to the humanoid robot’s capabilities, thus reducing training time and improving operational and task effectiveness.
DLR’s Rollin’ Justin has a proven track record of success with a combination of high payload, and great operational dexterity that is still unmatched in the world. Our aim in deploying humanoid robots in space is echoed by the NASA Robonaut series, one of which has been upmassed to the ISS.
Different missions and scenarios require different methods to command and collaborate with a humanoid robot. Therefore, we have developed a wide range of solutions that enable interaction at different levels of abstraction, from deep immersion with haptic feedback telepresence (Kontur-2 mission), to supervised autonomy (METERON mission), to going towards full autonomy (space structure assembly).


{kind=link}