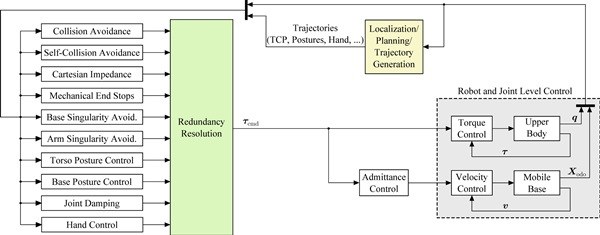
Reactive, multi-objective mobile manipulation on Rollin' Justin is realized by imposing a task hierarchy via null space projections. Higher priority tasks are executed while lower priority tasks are only accomplished if enough kinematic redundancy is left. The developed whole-body controller simultaneously considers aspects such as
safety
physical constraints
task execution
further optimization criteria
The concept combines a large number of independently developed methods (see signal flow chart) and allows for safe and efficient human-robot interaction. Such a reactive behavior is the key for safe, future service robots in human environment.
Safe interaction with a human: Compliance by torque control
Alexander Dietrich, Thomas Wimböck, Alin Albu-Schäffer, and Gerd Hirzinger, "Reactive Whole-Body Control: Dynamic Mobile Manipulation Using a Large Number of Actuated Degrees of Freedom",IEEE Robotics & Automation Magazine: Special Issue on Mobile Manipulation, vol. 19, no. 2, pp. 20-33, June 2012.
Alexander Dietrich, Christian Ott, and Alin Albu-Schäffer, "Multi-Objective Compliance Control of Redundant Manipulators: Hierarchy, Control, and Stability"in Proc. of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, November 2013, pp. 3043-3050.
Alexander Dietrich, Thomas Wimböck, and Alin Albu-Schäffer, "Dynamic Whole-Body Mobile Manipulation with a Torque Controlled Humanoid Robot via Impedance Control Laws" in Proc. of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, USA, September 2011, pp. 3199-3206.
Alexander Dietrich, Alin Albu-Schäffer, and Gerd Hirzinger, "On Continuous Null Space Projections for Torque-Based, Hierarchical, Multi-Objective Manipulation",in Proc. of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, USA, May 2012, pp. 2978-2985.