
ROKVISS
Runtime | 2005-03-22 to 2010-11-02 |
Project partners |
|
Acronym | Robotikkomponenten-Verifikation auf der ISS (ROKVISS) |
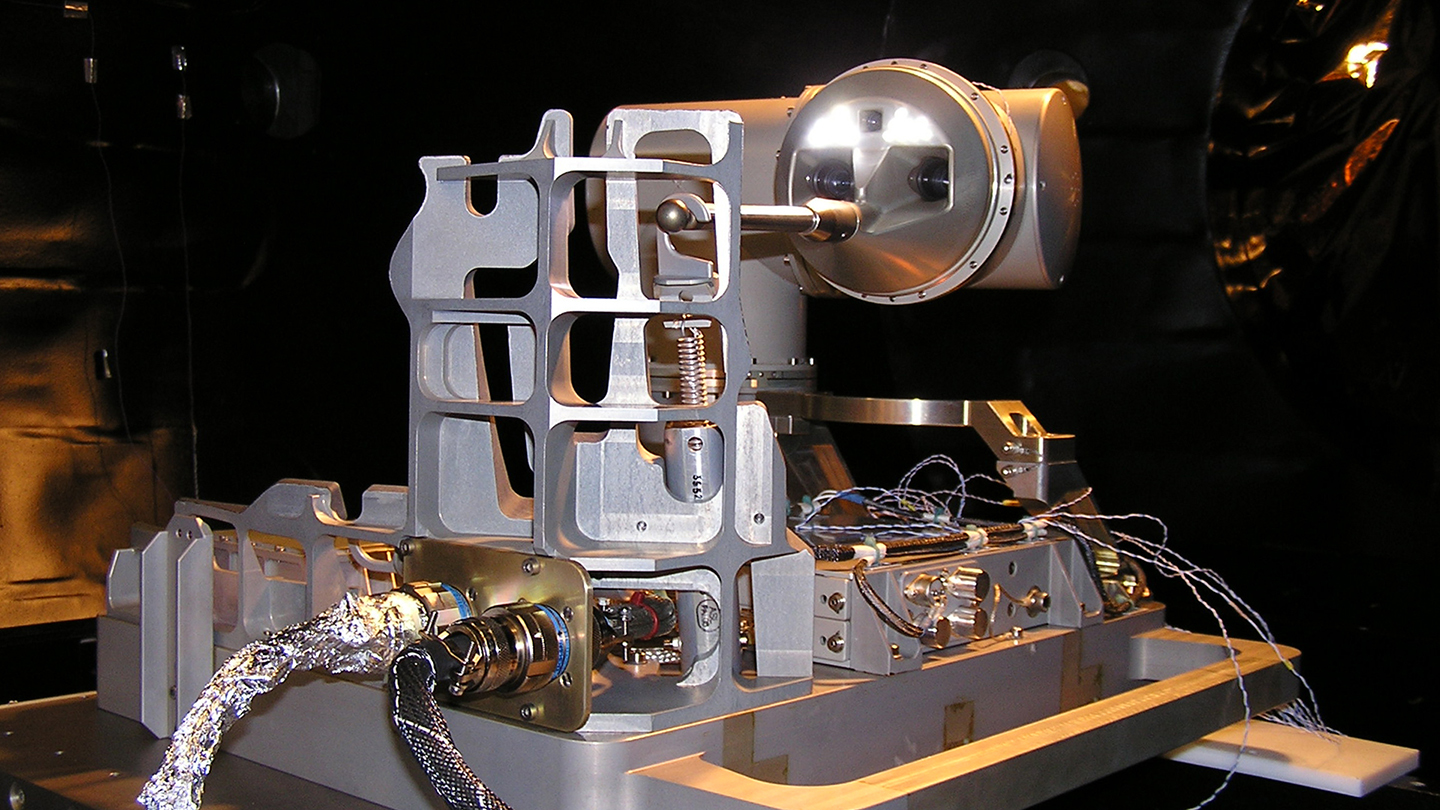
Fields of application | Space Robotics, designed for repair and assembly work in open space, Technology development for new lightweight robotic elements |



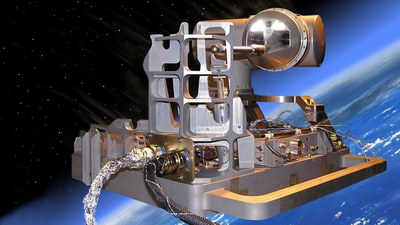


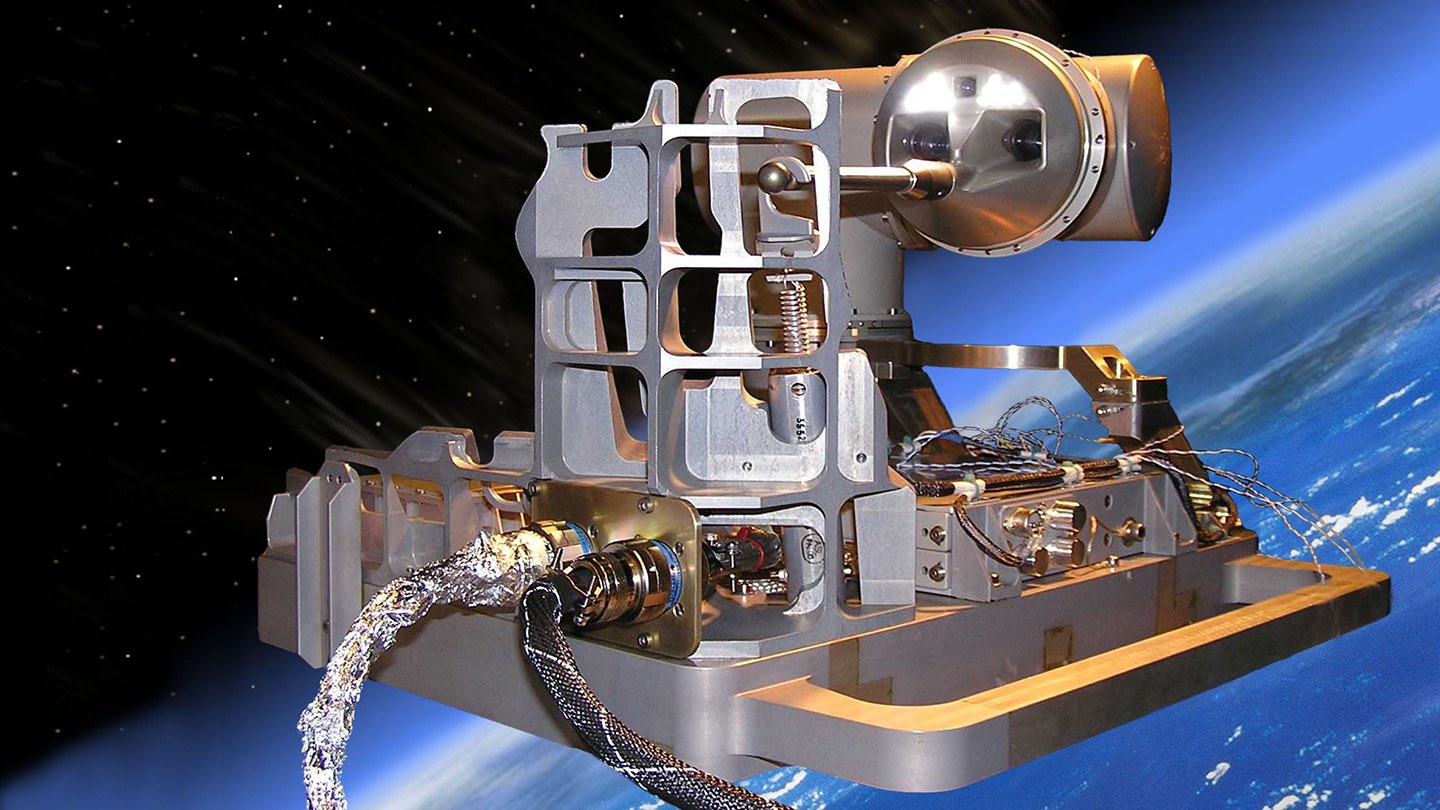

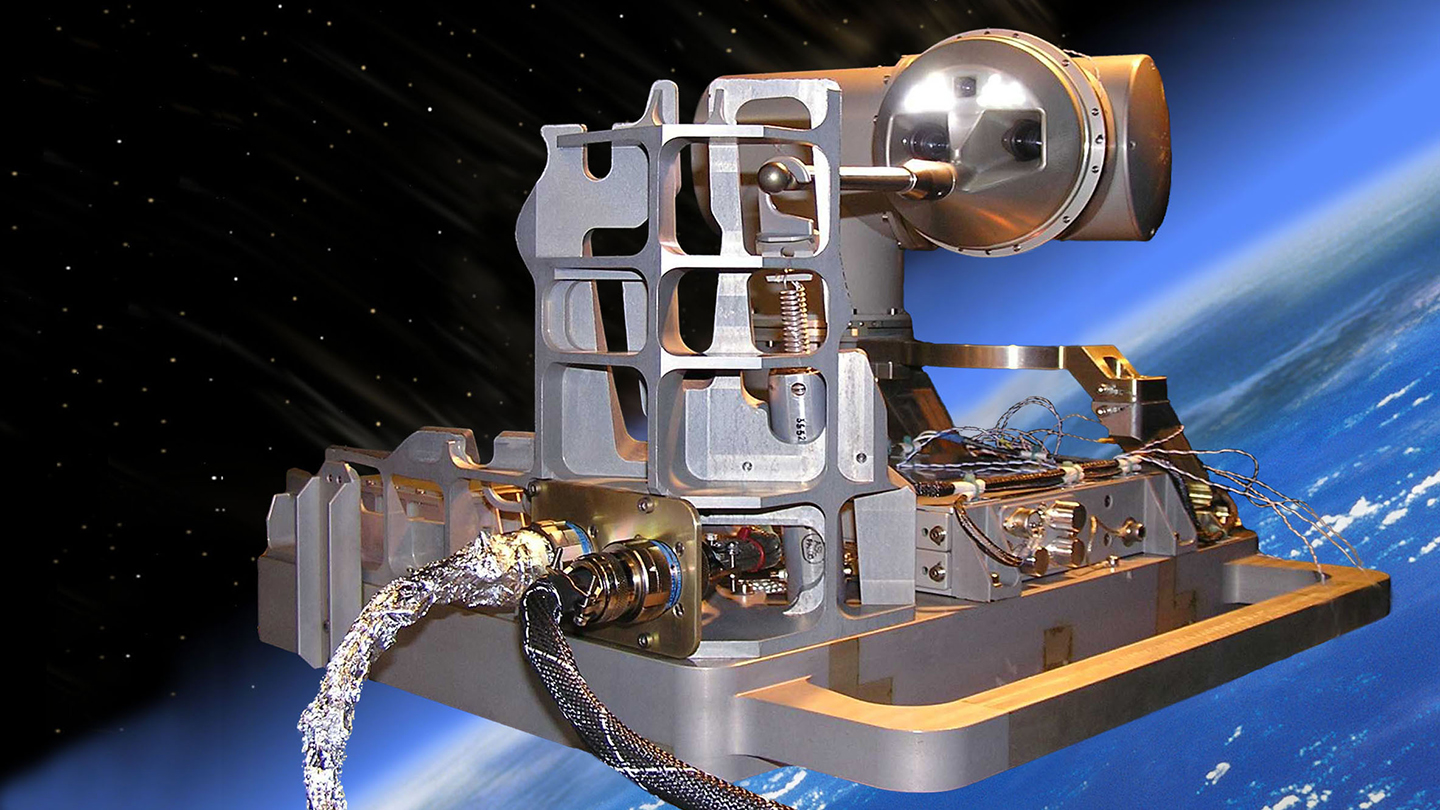
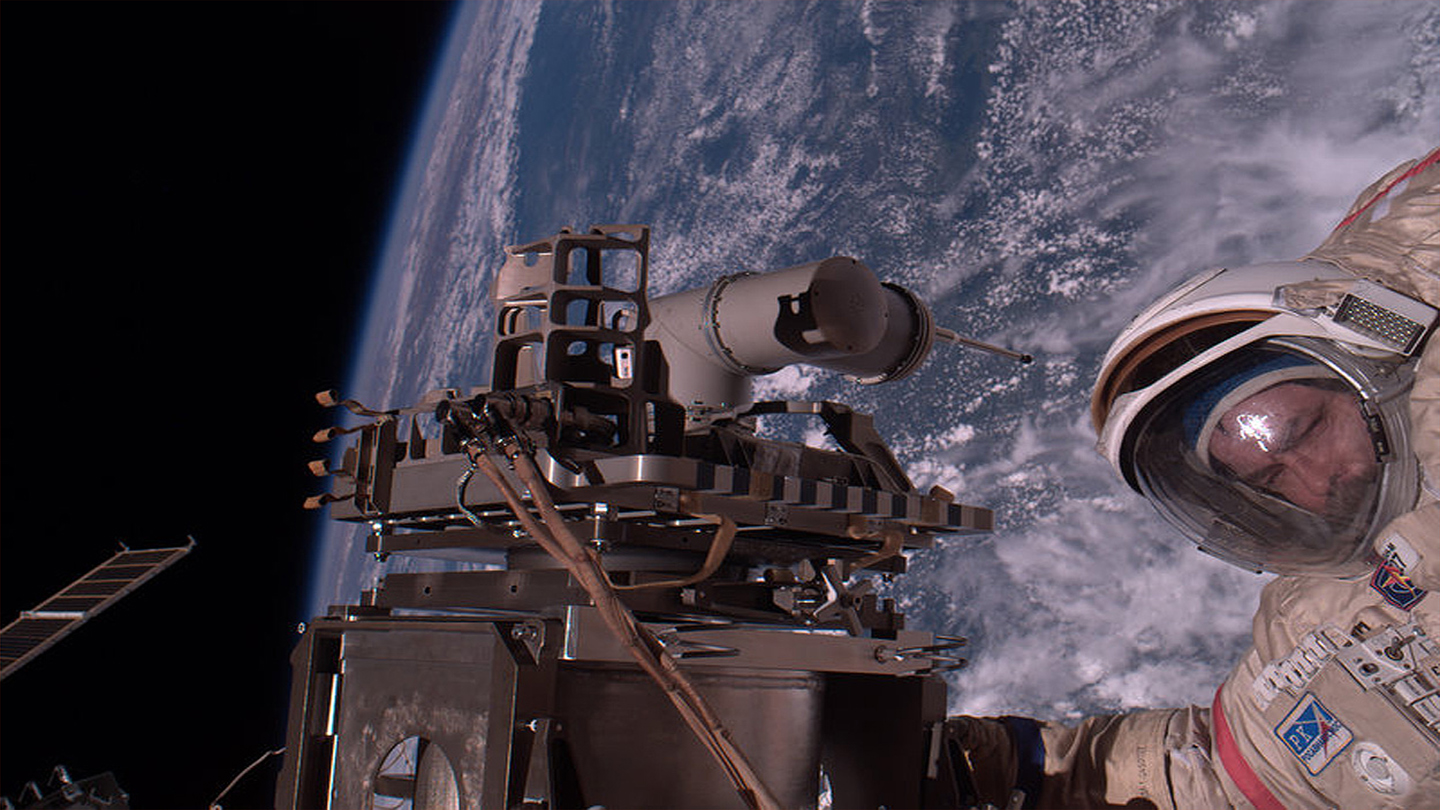
Artistic representation of ROKVISS in space
ROKVISS was developed for use in free space.

{kind=link}
{kind=link}
{kind=link}