
German robot arm on the International Space Station undergoes further tests

{kind=link}
Cologne/Oberpfaffenhofen - The ROKVISS (Robotics Components Verification on the ISS) technology experiment developed by the German Aerospace Center (DLR) in Oberpfaffenhofen can now be controlled and set in motion from the ground. The tests were carried out from the DLR ground station in Weilheim, Upper Bavaria, during the approximately six-minute flight over the ISS. During the commissioning of the ROKVISS experiment, the direct radio link, the cameras and the lighting system have so far been successfully tested, and the first measurement data from the robot joints have been received, confirming the proper functioning of the joint electronics. Commissioning of the system is scheduled to be completed by mid-March 2005, so that nominal operation can then begin. Until 14 March 2005, the ISS will be in a flight attitude that does not allow direct contact with the experiment. Until this date, further tests of the system will take place on the ground.
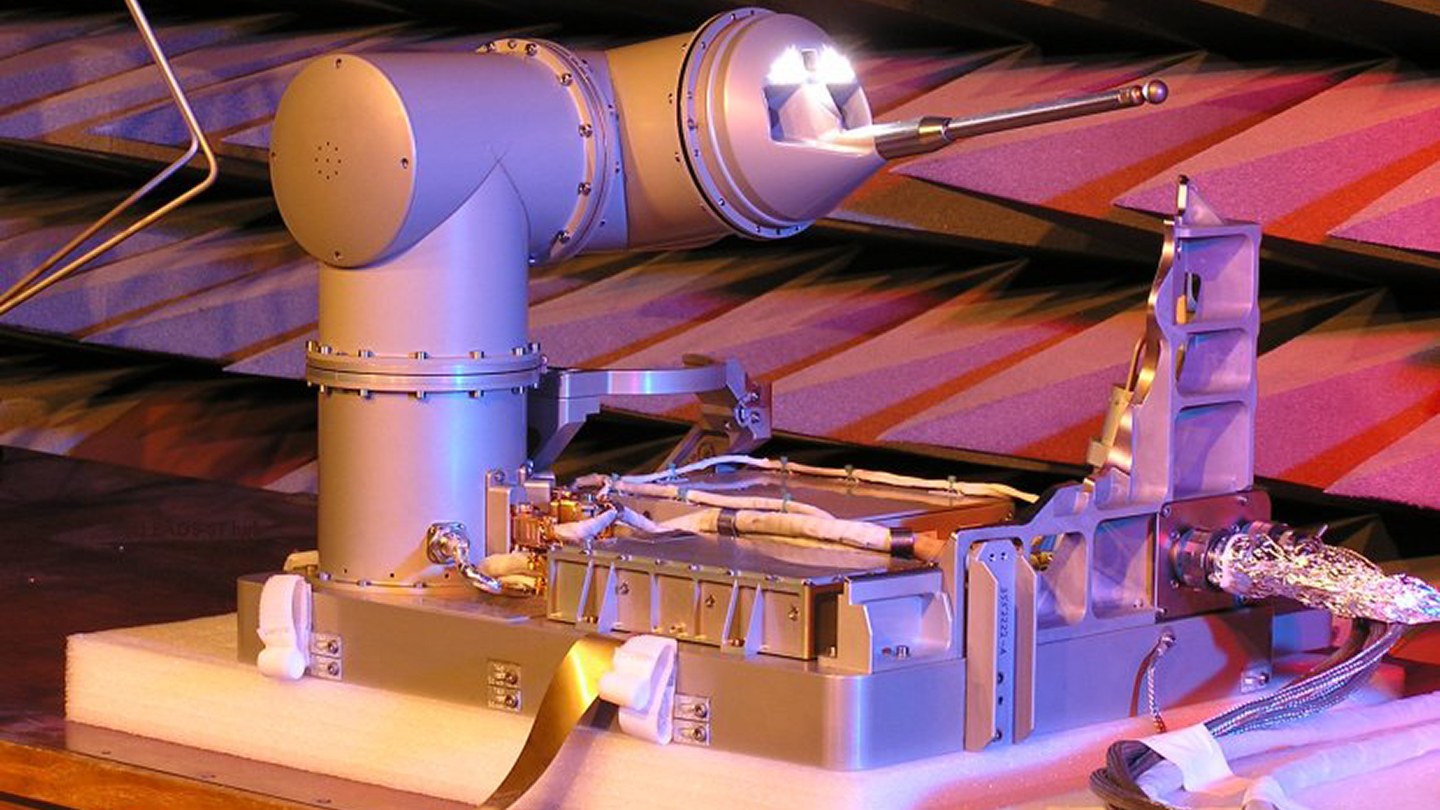
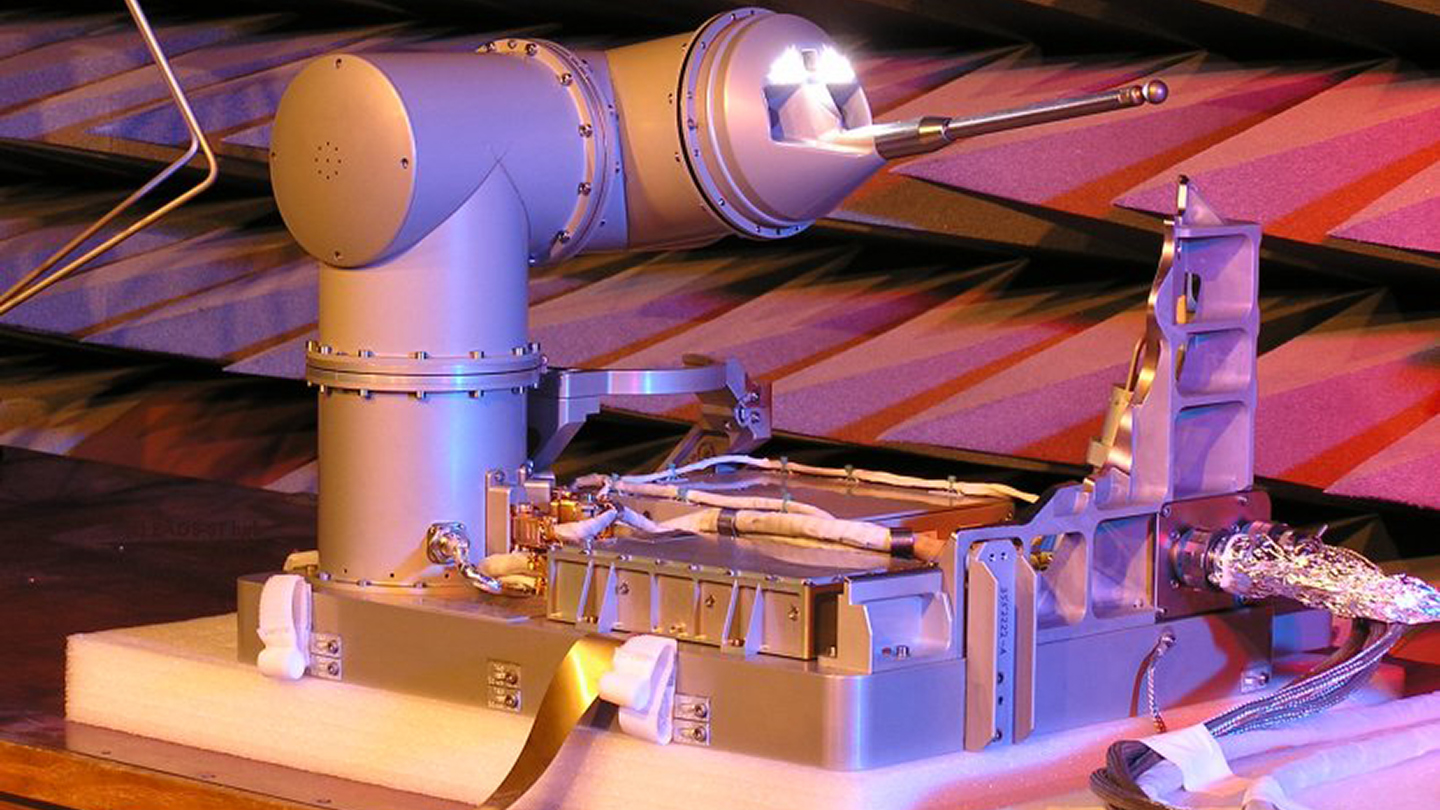
The robot arm, which is mounted on the International Space Station (ISS) and measures 50 centimeters in size and weighs seven kilograms, has two joints, a metal finger and two integrated cameras and is intended for use in future during repair or assembly work in open space. The experiment, developed at the DLR Institute of Robotics and Mechatronics with new hardware and powerful control concepts, is to take place in real time, in what is known as telepresence mode. For the first time, a robot in space will be controlled from Earth without any significant time delay - a novelty in space robotics.
On 24 December 2004, the robot arm was brought to the ISS from the Russian spaceport Baikonur by a Russian Soyuz U rocket. The external assembly was carried out by the two astronauts Salizhan Sharipov and Leroy Chiao on 26 January 2005 at 8.26 CET during an approximately six-hour "space walk".