
Outdoor installation of ROKVISS on International Space Station
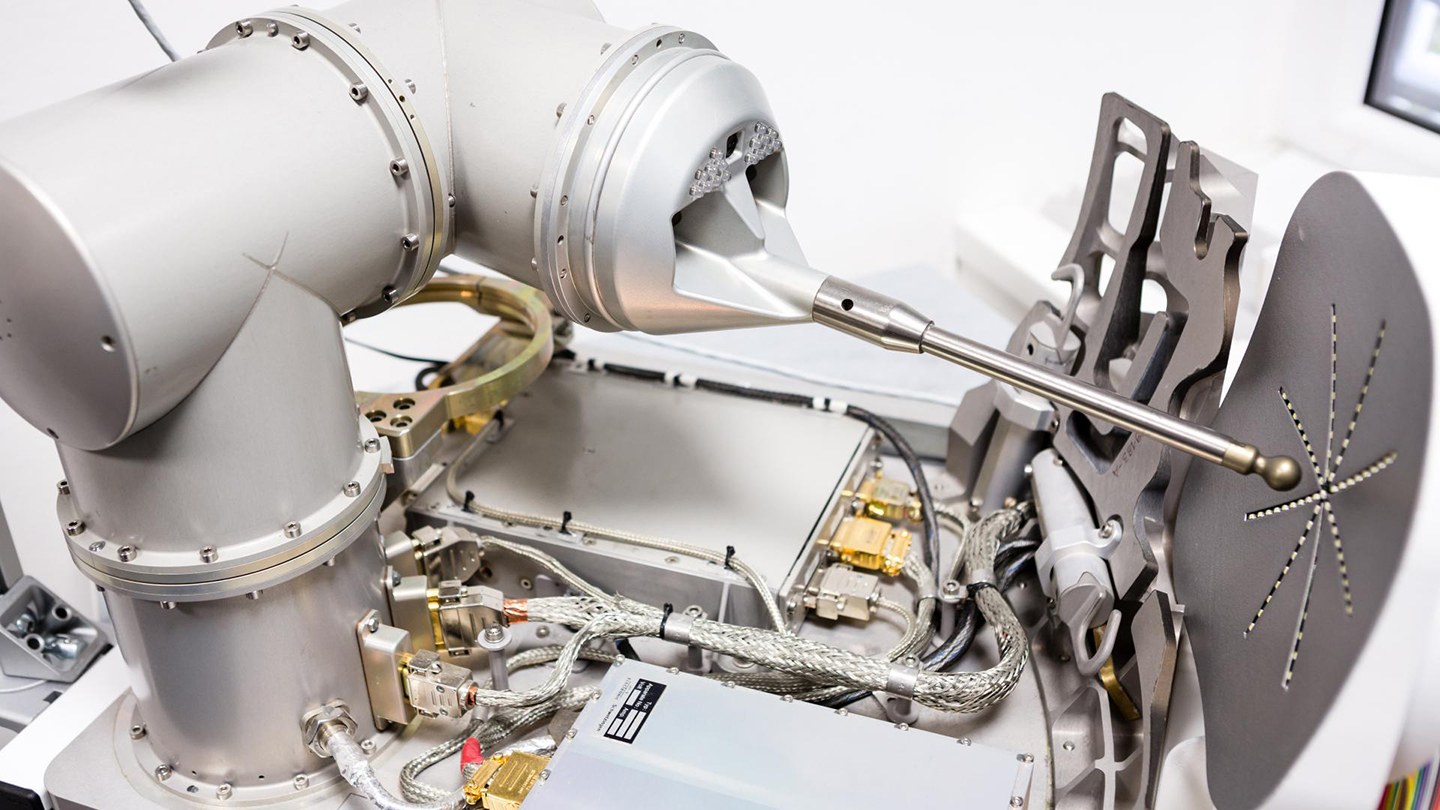

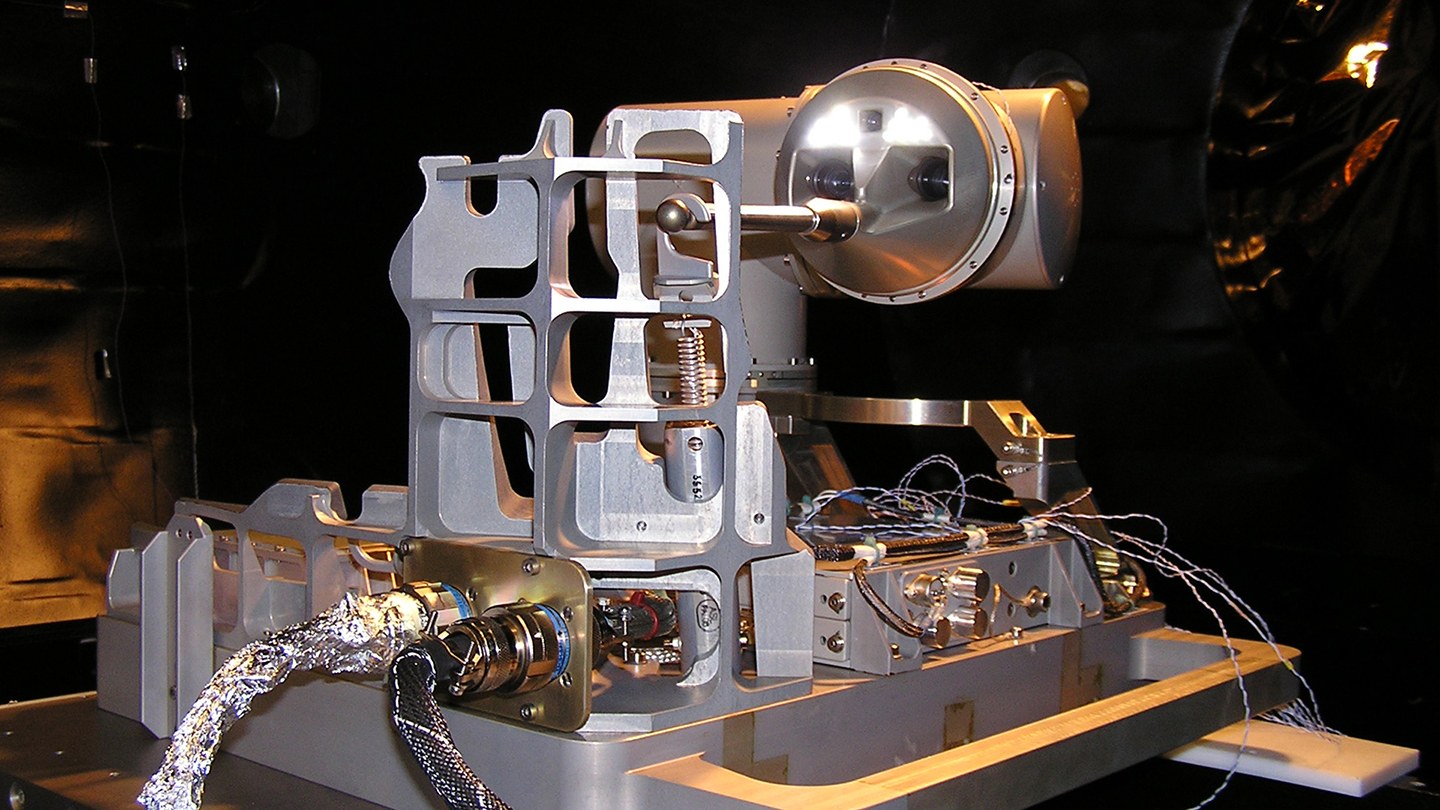
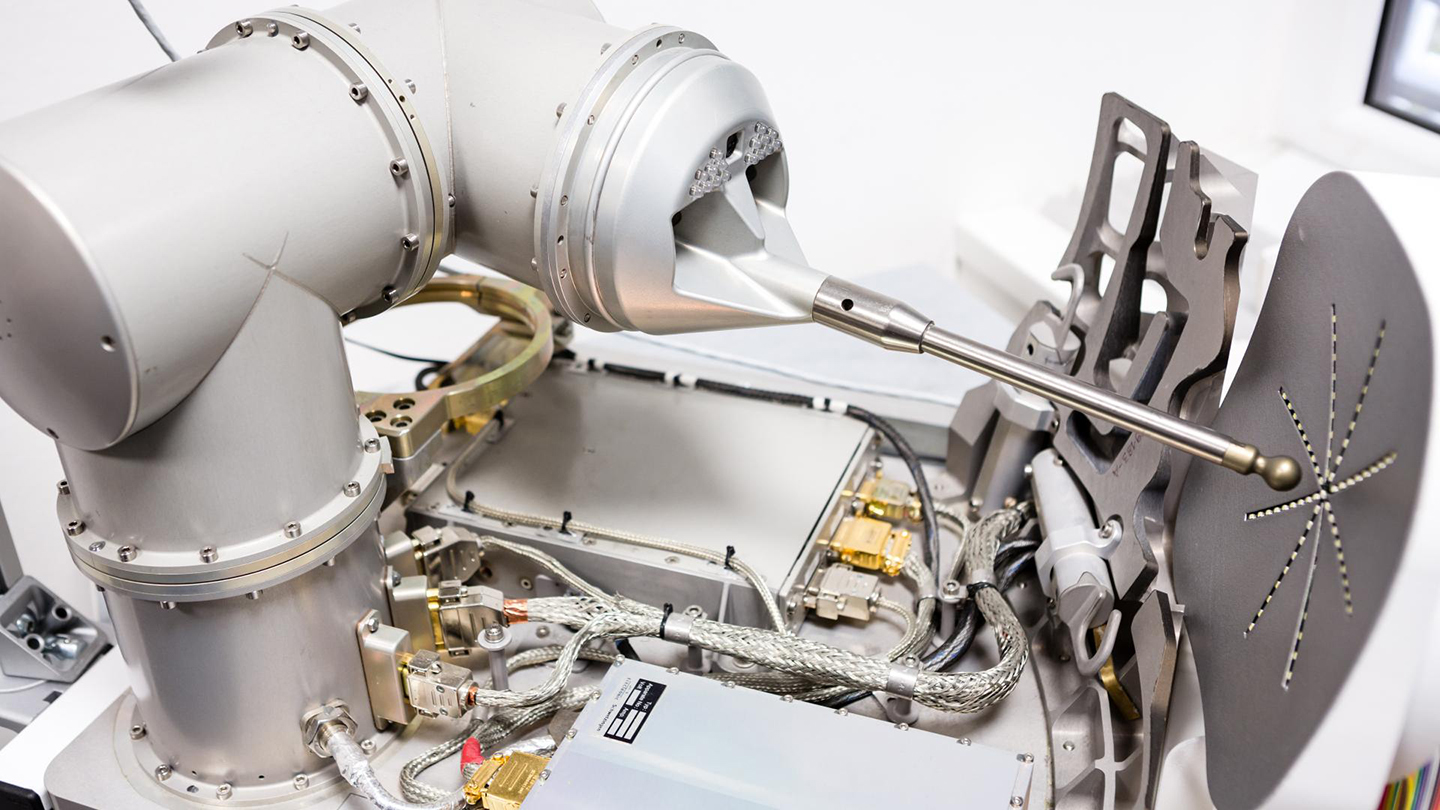
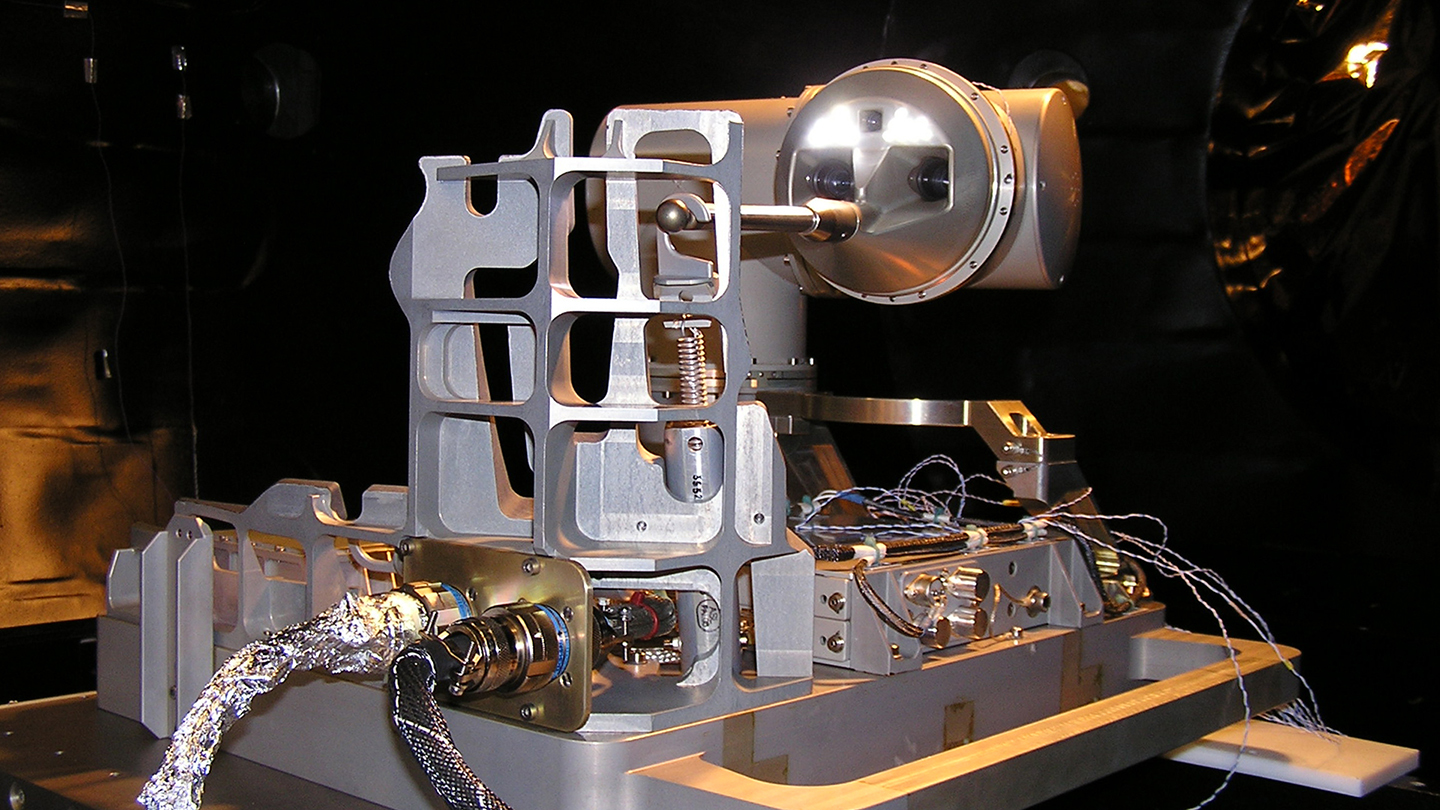
Bonn - The ROKVISS (Robotics Components Verification on the ISS) technology experiment developed at the German Aerospace Center (DLR) will be mounted on the outer platform of the International Space Station (ISS) by the astronauts on 26 January 2005. On 24 December 2004, the German robot technology was launched to the ISS from the Baikonur spaceport together with food for the crew. Following tests in February, the approximately 50-centimetre robot arm with two joints, a metal finger and two integrated cameras will be put into operation in March.
On 26 January 2005 at 8.26 a.m. CET, US astronaut Leroy Chiao and his Russian colleague Salizhan Sharipov will open the airlock of the ISS and carry out the external assembly of the ROKVISS robot during an approximately six-hour "spacewalk", an Extra Vehicular Activity (EVA). To do this, the two astronauts attach a so-called universal platform to the outer wall of the Russian service module Zvezda. ROKVISS is then mounted on this platform.
ROKVISS has its own communication unit which establishes contact with the DLR ground station in Weilheim during direct overflights of the ISS over Germany. This communication unit (transmitter, receiver and antenna) is mounted on a separate mast, also on the Russian service module. The communication unit and robot must then be connected to the ROKVISS on-board computer inside the Russian service module by several cables, which the astronauts also lay.
{kind=link}
{kind=link}
The project is financed by the German Aerospace Center (DLR) with funds from the Federal Ministry of Education and Research (BMBF). The hardware and software has been developed and built by EADS Space Transportation in Bremen as prime contractor and the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen, which is responsible for the robotic components and the execution of experiments as well as the scientific evaluation of the results. The Munich-based company Kayser-Threde was responsible for the development and construction of the experiment computer, the power supply and technical support for the DLR institute. The company Hoerner & Sulger supplied the camera equipment with electronic accessories. The project is managed by DLR's Space Agency. The execution of the mission is based on an agreement between DLR's Space Agency, the Russian partners, Roscosmos and RKK Energija and the Munich-based company Kayser-Threde as prime contractor for the S-band communication infrastructure.
The costs for the ROKVISS experiment amount to 11.5 million euros, including 3.5 million euros for launch, assembly and operation on the ISS, which Germany pays to the Russian contract partners.
The Extra Vehicular Activity (EVA) will be broadcast live on NASA TV on January 26, 2005.