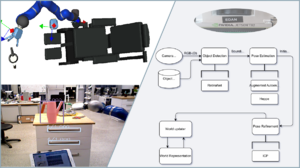
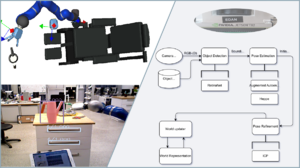
In order for an assistance robot like EDAN to provide support in performing everyday activities, accurate and reliable perception of the environment is required. By recognizing and localizing objects, the robot can offer the right semi-autonomous or autonomous capabilities according to the situation and thus provide targeted support to the user. On the EDAN robotic system, we use a combined color and depth camera to sense the environment. A deep-learning based object recognizer first detects all relevant objects in the robot's environment. Then, the position of the object is determined by a specially trained autoencoder and refined by a model-based approach. The objects EDAN can interact with are stored in a database, which we are continuously expanding.


{kind=link}