
MMX Nav Testing

{kind=link}
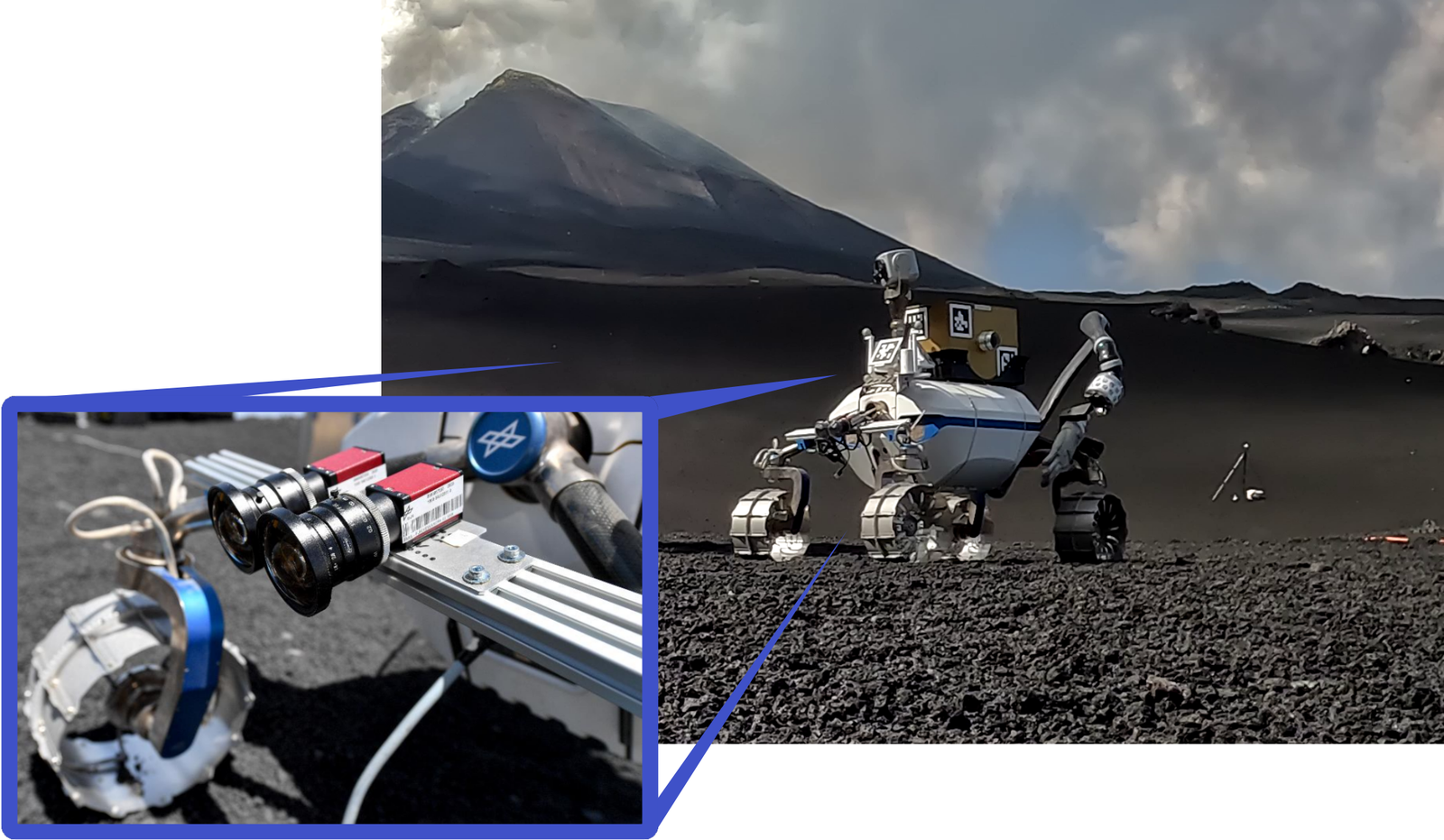
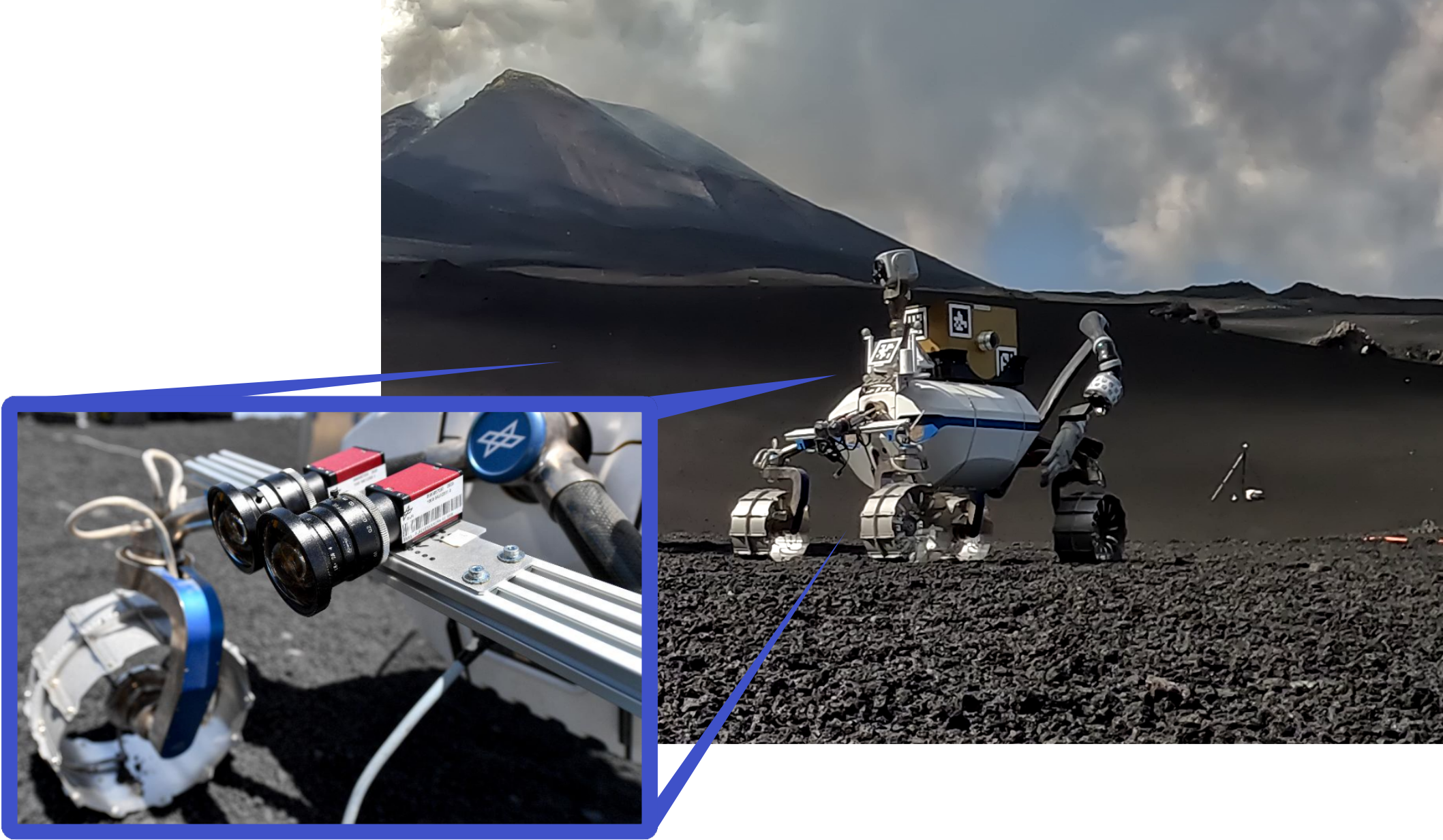
The MMX rover will explore the surface of Phobos, Mars’ bigger moon. It will use its stereo cameras for perceiving the environment, enabling the use of vision based autonomous navigation algorithms. The German Aerospace Center (DLR) is currently developing the corresponding autonomous navigation experiment that will allow the rover to efficiently explore the surface of Phobos, despite limited communication with Earth and long turn-around times for operations.
Our testing is mostly data set-based for which we recreate the environmental conditions on Phobos as closely as possible. We make the corresponding data set publicly available and provide an overview on its content.
Data set website: https://datasets.arches-projekt.de/mmx-nav-testing/
License: CC BY-NC-SA
Literatur
- Meyer, L. et al., Testing the MMX Rover Autonomous Navigation Experiment on Phobos, 2023, in press
- Lukas Meyer, Michal Smíšek, Alejandro Fontan Villacampa, Laura Oliva Maza, Daniel Medina, Martin J. Schuster, Florian Steidle, Mallikarjuna Vayugundla, Marcus G. Müller, Bernhard Rebele, Armin Wedler, and Rudolph Triebel: The MADMAX data set for visual‐inertial rover navigation on Mars, Journal of Field Robotics (JFR), 1–21, March 2021, DOI: 10.1002/rob.22016, [elib]