
Automatica 2008
At the 2008 Automatica, which has taken place in Munich from June 10 to 13, we displayed many of our research results. Below you will find a selection of our displays.
- Mobile Humanoid "Justin"
- Multimodal Telepresence
- Medical Robotics with light-weight systems
- Vision and Force Controlled Assembly
- Multi-sensor five-fingered hand with fifteen degrees of freedom
- Safety in Human-Robot Interaction
- The DLR Crawler – a Six-Legged Actively Compliant Walking Robot
- Virtual Bavaria
- The artificial DLR-Heart
- Downloads
Mobile Humanoid "Justin"

{kind=link}
The DLR Humanoid "Justin" came a long way since its last public display: it is mobile!
In the future humanoid robots are envisioned in household applications as well as in space environments. The capability to carry out complex manipulation tasks is a key issue. For its achievement the development of robust control strategies and intelligent manipulation planners for dual handed manipulation is currently a matter of active research in the robotics community.
The mobile robotic system Justin with its compliant controlled light weight arms and its two four finger hands is an ideal experimental platform for these research issues. The newly developed mobile platform allows the long range autonomous operation of the system. The individually movable, spring born wheels match the special requirements of “Justin's” upper body during manipulation tasks. PMD sensors and cameras allow the 3D reconstruction of the robot's environment and therefore enable Justin to perform given tasks autonomously.
Multimodal Telepresence


The DLR light-weight robot is used as a haptic device within a multimodal human system interface. Due to its high dynamic performance, its workspace and its extreme light-weight design it is very suitable to feed back realistic forces from a remote or virtual world. Through this interface the operator can act intuitively in remote or virtual environments, while perceiving stereo-visual, acoustic and bi-manual haptic feedback.
A typical application for telerobotic systems is the maintenance of technical systems in hard-to-reach and/or dangerous places (e.g. space or nuclear plants). This remote maintenance is demonstrated using the mobile humanoid JUSTIN (see exhibit no. 1).
Acting intuitively in virtual worlds is presented by an assembly verification simulation. Verifying the assembly process is essential, especially for designing complex technical systems like cars or planes. An immersive multimodal human system interface allows the operator to improve mountability and maintainability by using digital prototypes instead of real ones, which shortens the time required for development and which saves money.
Medical Robotics with light-weight systems

DLR has developed the light-weight robot MIRO for the application in various surgical procedures. Its low weight and compact dimensions simplify the integration of one or more robot arms into the operating room where space is sparse. MIRO’s features and performance allow applications in open surgery as well as minimally invasive surgical procedures like endoscopic heart surgery. DLR integrates three MIRO robots in the presented MIROSURGE project: two robots guide sensor integrated, proprietary forceps for bimanual manipulation with force feedback, while a third one controls a stereo endoscope for 3D-Vision.
Vision and Force Controlled Assembly
Automated assembly processes traditionally rely on a high level of accuracy in the feeding of parts and the robot positioning. The DLR lightweight robot provides a fundamentally new solution to the advanced part assembly in industrial manufacturing. All robot joints are equipped with not only motor position sensing but also with joint torque sensors, thus allowing position-, velocity- and torque-control. Compliant behavior can be arbitrarily defined, i.e., a relation between the position deviation and external force can be given for every section of the trajectory.
A combination of these compliance properties with an image processing system and an optimal assembly trajectory planning is used to solve an assembly task. The vision system identifies the objects and controls the robot motion to predefined relative poses, whereas the joint torque sensors provide local feedback about the parts in contact. Robustassembly trajectories are generated offline based on the geometry of the parts involved. The planning optimizes trajectories as well as compliance parameters in order to maximize the robustness of the insertion.
Multi-sensor five-fingered hand with fifteen degrees of freedom

On the technology basis of the DLR-HIT Hand I, the Harbin Institute of Technology (HIT) and the German Aerospace Center (DLR) have jointly developed a new robot hand. Compared with the DLR-HIT Hand I, the new hand, DLR-HIT Hand II, has five modular fingers and each finger has four joints and three degrees of freedom, which is smaller and lighter.
Altogether there are 15 motors in the finger body and palm. The hand is actuated by commercial flat brushless DC motors commutated by digital hall sensors.
There is an absolute angle sensor and a strain-gauge based joint torque sensor at each joint. The high speed real time communication bus is implemented by FPGA.
The DLR-HIT Hand II is the further development of the DLR-HIT Hand I, which has been successfully used in some research institutes in USA, Spain, Italy, Greece, Germany and China.
DLR-HIT-Hand I was awarded by IF-Design Award 2007 and first prize of EURON Technology Transfer Award 2007 for the successful cooperation between research and industry.
Safety in Human-Robot Interaction

DLR is highly engaged in the evaluation of “safety in Human-Robot Interaction” within several European projects (SMErobot, PHRIENDS).
- Scenario: The DLR Lightweight Robot III was developed with strong emphasis on direct Human-Robot Interaction. It is equipped with sensitive joint torque sensing in each joint in order to realize direct physical interaction. The new KUKA Lightweight robot is the result of a technology transfer from DLR to the robot manufacturer KUKA Roboter GmbH. In order to present our overall concept for “safety in Human-Robot Interaction” a Co-Worker scenario was developed and evaluated.
- Crash Tests: Standardized crash tests for assessing human injury during collisions with the Lightweight Robot show the origins of our work for a classification and evaluation of injury in human-robot interaction.
- Collision Detection and Reaction: The integrated position and torque sensors of the Lightweight robot allow fast and sensitive collision detection and reaction. This gives the robot even the ability to prevent injuries with sharp tools.
- “Feel the safety”: User interaction is an integral part of this exhibit, giving the visitor a hands-on experience of the collision detection and reaction mechanisms.
The DLR Crawler – a Six-Legged Actively Compliant Walking Robot
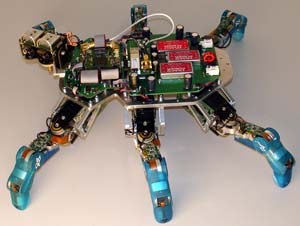
The DLR Crawler is a six-legged walking robot that is based on the fingers of the DLR Hand II. It is a preliminary version of future exploration robots that is used as test bed for the development and evaluation of different force and kinematics based gait and control algorithms. Due to their modularity and comprehensive sensor equipment the fingers of the DLR Hand II are very well suited as legs for this first prototype. The availability of joint torque sensors and 6 DOF force-torque sensors integrated in the finger tips allows the use of active compliance control as well as Cartesian impedance control. The crawler is automatically controlled in real-time by sophisticated exploration and navigation techniques, which use stereo vision based 3D ego motion calculation and simultaneous localisation and mapping (SLAM) methods. Furthermore, the data can be used for 3D modelling of the environment.
Virtual Bavaria
The German Aerospace Center (DLR) develops technologies for the photo-realistic 3-d object reconstruction and 3-d representation in scientific and non-scientific applications.
Accordingly, high-resolution images of the surfaces of the Mars and the Earth were captured with the HRSC, a camera specially developed for planetary exploration. In a subsequent step, the images are processed with novel stereo reconstruction methods generating fully textured 2.5-d surface models at a resolution of up to 15 cm.
Finally, 3-d representations of these landscapes are obtained with an autosteroscopic display (SpatialView Inc. Dresden, Germany) in consideration of optimal stereoscopic parameters. A newly developed video-optic eyetracker precisely controls the focus of the display such to generate 3-d impressions for varying viewing positions.
The artificial DLR-Heart

The innovative technique of the implantable DLR - ventricular assist device provides, for the first time, a true alternative for heart transplant patients. Despite stringent guidelines for organ donations, the overall number of transplants is still declining. Waiting for a new heart may take up to two years and about a quarter of the patients die while still on the waiting list. The only alternative to transplant is to stabilise the circulation with the help of an artificial blood pump. The DLR-Heart was developed as a response to the problems associated with the assist devices currently on the market. It overcomes these problems and facilitates a long term therapy.
The Institute of Robotics and Mechatronics transfers its extensive knowledge of robotic systems, acquired during years of successfully developing innovative systems for aerospace, to the ventricular assist device and thus expands into medical technology. As in aeronautics, highest standards regarding quality, reliability and durability have to be fulfilled. The project has received numerous national and international awards.
Downloads
- DLR @ Automatica 2008 (2.4 MB)