
Success of the RMExplores! Team at SpaceBot Camp 2015


{kind=link}
The Robotics and Mechatronics Center (RMC) of the German Aerospace Center (DLR) participated as team RMexplores! in the SpaceBot Camp presentation in November 2015 with great success. The SpaceBot Camp, organized by the DLR Space Administration, set out as a national robotics challenge inspired by the DARPA robotics challenges in the US. The main focus of the SpaceBot Camp lies on autonomous robotic behavior, in particular for exploration and manipulation in an unstructured, previously unknown environment. The motivation for the Spacebot Camp was to identify new levels of excellence, stimulate innovations and foster research and development in the field of robotics. Ten teams from universities and research institutes aimed at fulfilling a challenging task: A robot had to explore an area modelled after a moon-like planetary surface, locate and collect two different objects and transport them to a third object for assembly. All tasks, including the assembly, had to be executed within a time limit of sixty minutes. The whole mission had to be performed with a high level of autonomy since communication was delayed by four seconds (round trip) and limited to a downlink to receive data for supervision, except for limited occasions on which commands could be sent to the robots.
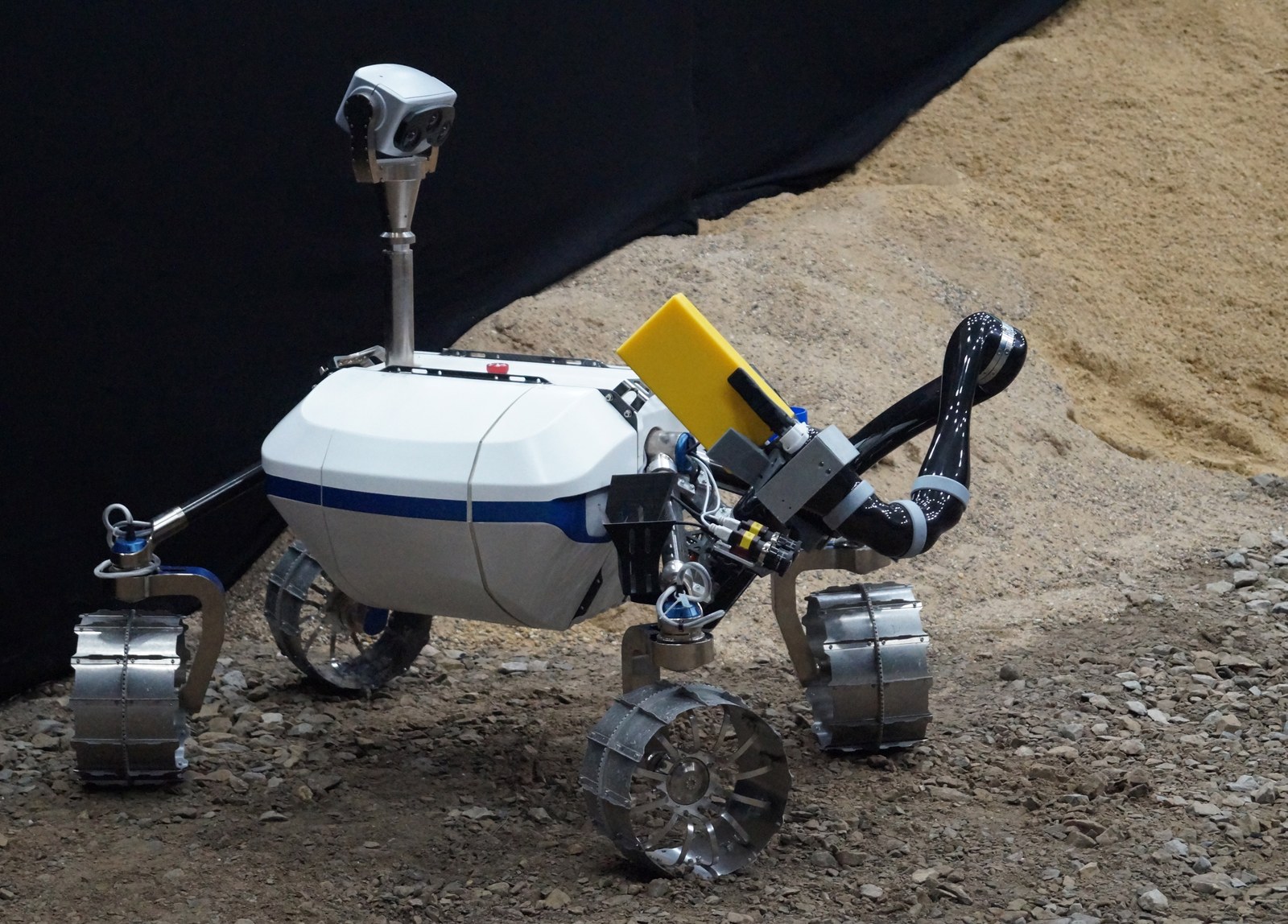
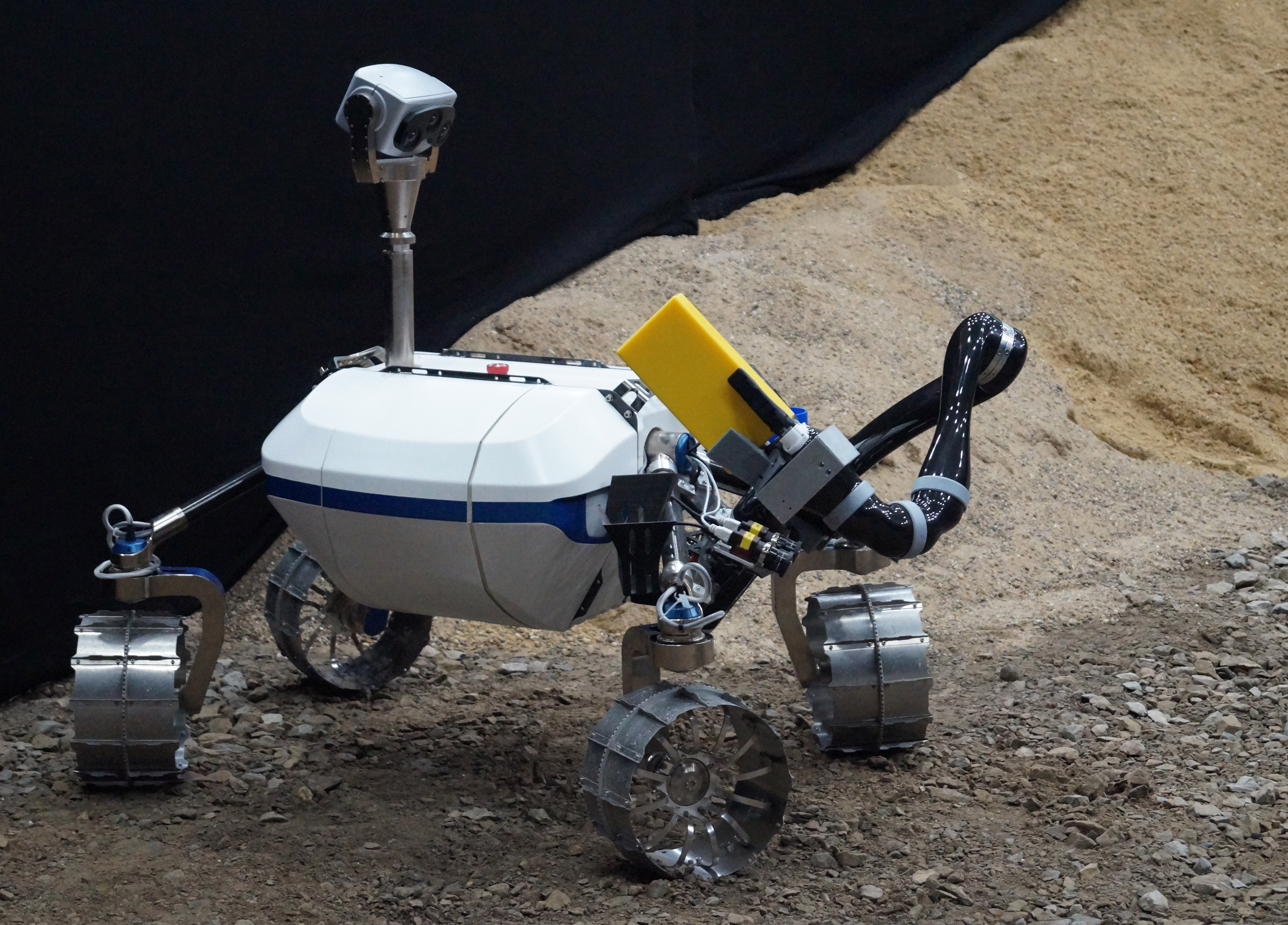
We designed our system, called the Lightweight Rover Unit (LRU), as a breadboard for a lunar rover. The rover is highly maneuverable due to its four independent wheels, each of them having individual steering and driving motors. We mounted a force-controlled robotic arm onto the back of the rover for object collection and assembly manipulation tasks. While the arm and rover body are hardware components designed for terrestrial applications, the whole rover locomtion sub-system as well as its pan/tilt sensor head follow the ideas of a space qualifiable design, allowing the DLR to propose this hardware and related software for future space missions.
{kind=link}
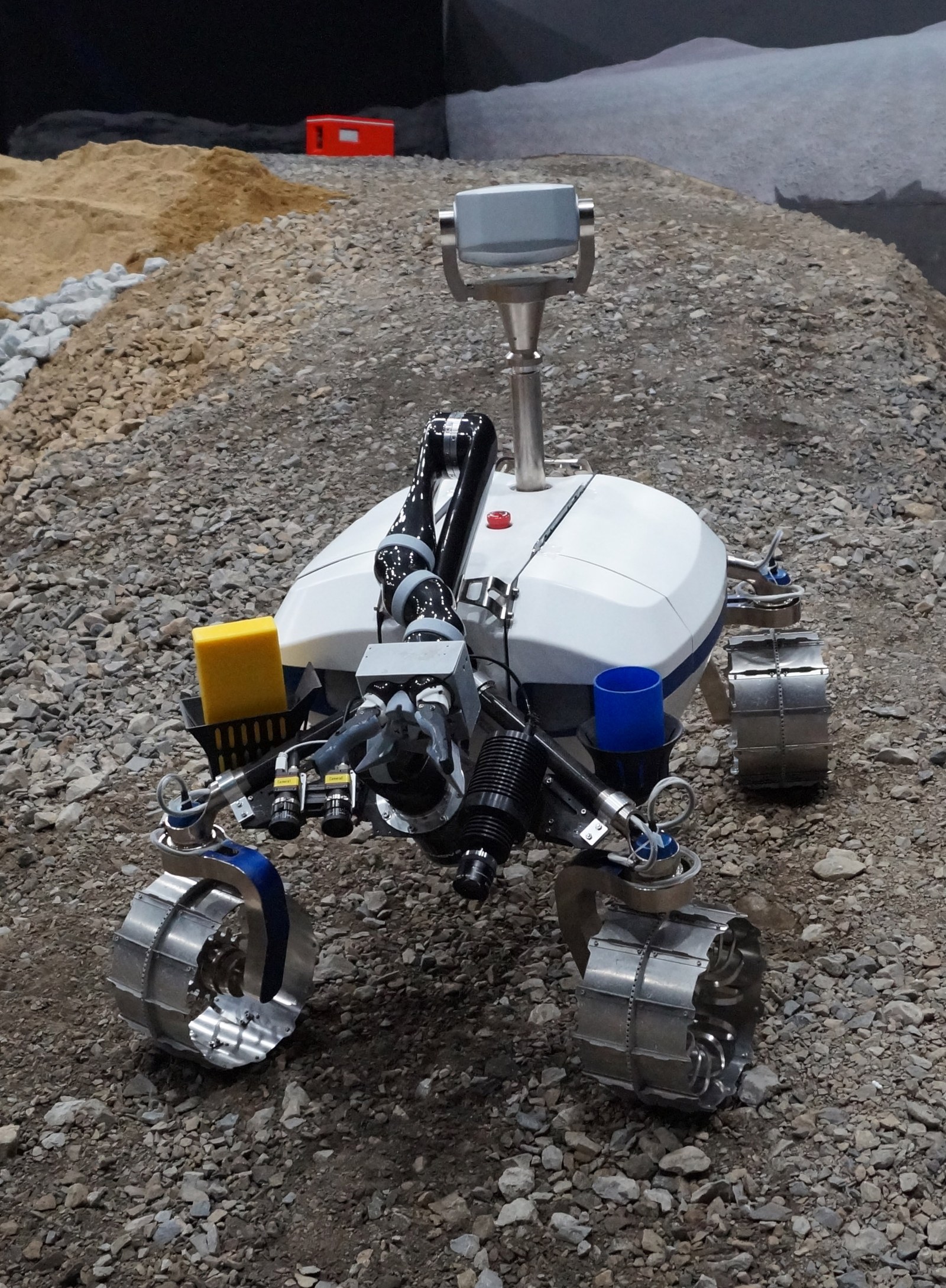
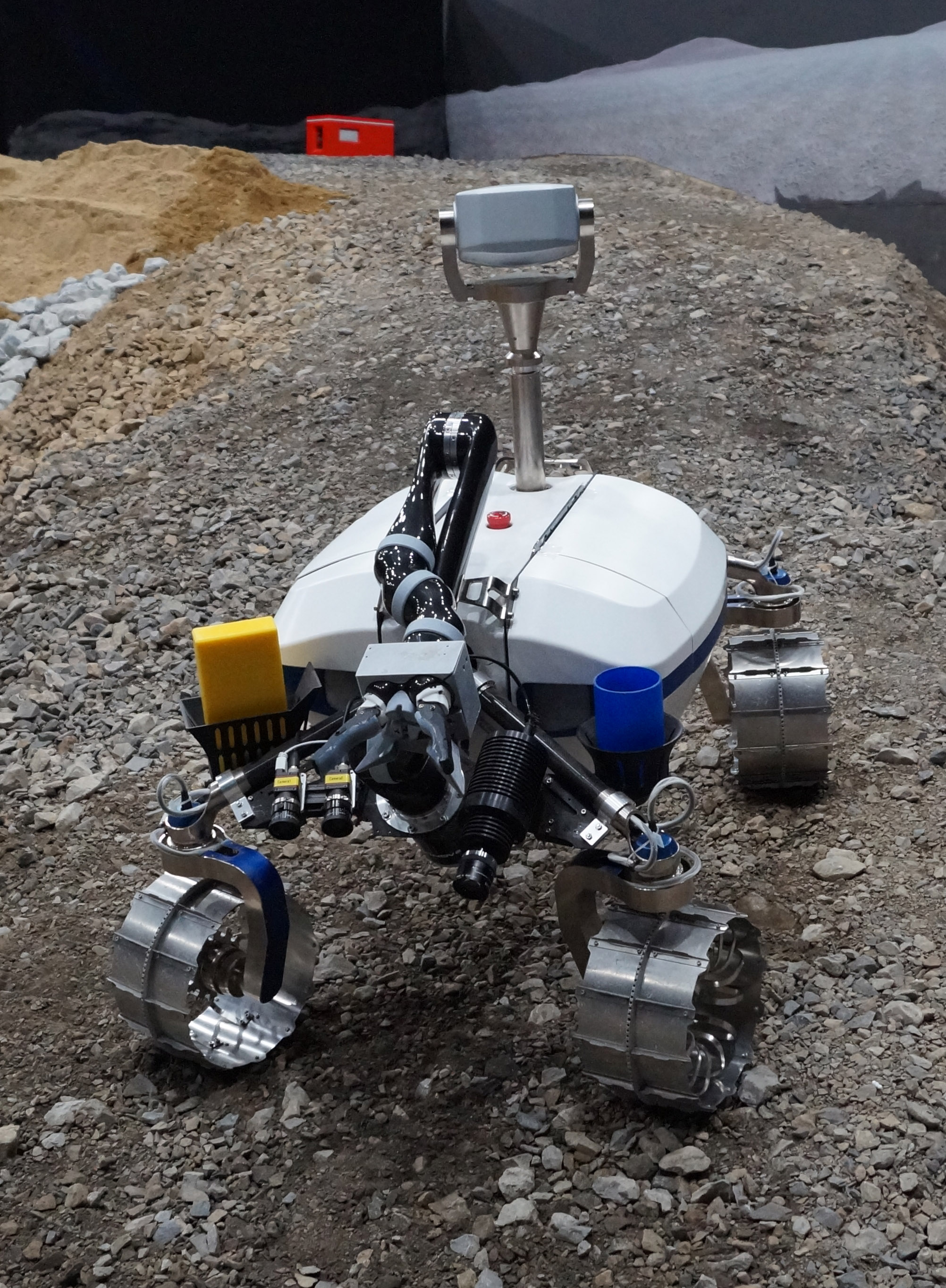
Similar to real space rovers, our LRU solely employs cameras to perceive the environment. Its main sensors are three cameras on a pan/tilt unit: Two of them provide stereo vision used for obstacle avoidance, mapping and navigation while the third camera gives additional color information for object detection. We added an additional pair of stereo cameras to the back of the LRU for precise, close-range object localization during manipulation with its robotics arm. The autonomy of our rover stems from a variety of highly sophisticated software components. We developed and integrated modules for self-localization in GPS-denied environments, local and global mapping, fast obstacle avoidance, path planning, manipulation, object detection, inter process communication as well as task and mission control. Thus, more than a hundred software components run on board the LRU, collaborating and communicating with each other in order steer the autonomous behavior of the robot.
The SpaceBot Camp in Hürth near Cologne, Germany transformed a movie studio into a moon-like landscape. Each of the ten participating teams had two days to prepare their robot(s) before presenting their system during their sixty minutes time slot in front of a public audience. A groundstation team was allowed to communicate with the robot, but was located in another room and thus had no visual contact to the competition area. In addition, a simulated two seconds delay (one-way) was added to all communication from and to the rover, which is similar to the real communication delay between earth and moon. Furthermore, the communication uplink from the groundstation to the robot was blocked except for up to three five-minute checkpoints. These limitations of manual intervention constrained the groundstation team to merely monitor the robot's autonomous behavior.
{kind=link}
Although many teams decided to soften these challenging communication constraints in order to allow mixed autonomy and teleoperation approaches, we faced both the delay and the disabled uplink from the very beginning of the mission. We were the only team to fulfill all tasks within the originally given specification. Our LRU accomplished the mission in half of the sixty-minute time limit and with full on-board autonomy. The only data sent from the base station to our rover during the whole mission were four high-level commands in order to double-check the results of our object localization, which is crucial for correct assembly. We thereby solely used a single one of the specified three communication checkpoints, including a delay of two second for all commands. Futhermore, the LRU was one of the few systems that managed to both climb and descended a steep ramp - also fully autonomous - a feat that only a few of the other robots dared to try.
Update (2016-04-25): A video about the misson is online.
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.