
Junior research group FUTURO: robots learn from their mistakes
For research on how to deal with failure situations in space assistance robotics for the development of planetary infrastructure - Failure and Uncertainty Tolerant Universal Robot Operation (FUTURO) - a junior research group can now be established at the DLR Institute of Robotics and Mechatronics. In a multi-stage internal competition process, Daniel Leidner was selected for funding from the DLR Executive Board's Space Agency. Now he has a funding amount of approximately 750 000 euro at his disposal for the next three years. This will enable him to set up his own research group in collaboration with the University of Bremen. The programme is modelled on the HGF junior research groups, but has a special focus on space travel. The idea is to provide targeted support for young scientists by creating an independent group. A special feature of the junior research groups is that at least half of the members are women.


{kind=link}
The future of manned spaceflight belongs to teams of astronauts and robots who are penetrating our solar system further than ever before. The robots used will be on a par with their human counterparts in terms of skill and decision-making authority. But there is still a long way to go before this happens. For although today's assistance robots already have advanced actuators and sensors, their cognitive abilities fall far short of their potential. The low tolerance for errors and a limited action catalog limit the robots' decision-making space and thus their autonomy. The project is scheduled to start in 2020.
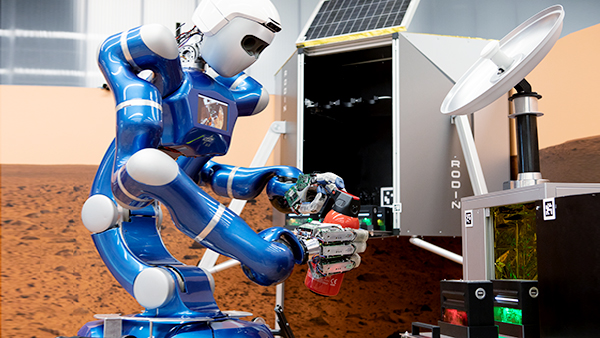
The FUTURO junior research group aims to raise the level of autonomy of today's robots to the next level. To this end, the robot Rollin' Justin should be able to understand at any time what effects its movements have on the environment. The latest methods from the field of artificial intelligence (AI) will be combined, including modern physics engines, machine learning and probabilistic planning. In this way, the robot will be able to draw conclusions about potential errors in the autonomous execution of tasks in order to avoid similar situations in the future. In addition, the robot is to use the planned procedure to recognize what changes it is causing in the world while being remotely controlled by an operator via haptic telepresence. This should make it possible to derive new robot actions from the operator's control signals without manual programming. The investigations of the junior research group should thus pave the way for the forthcoming exploration missions to the Moon and Mars.
Interested young female scientists can apply to Daniel Leidner.