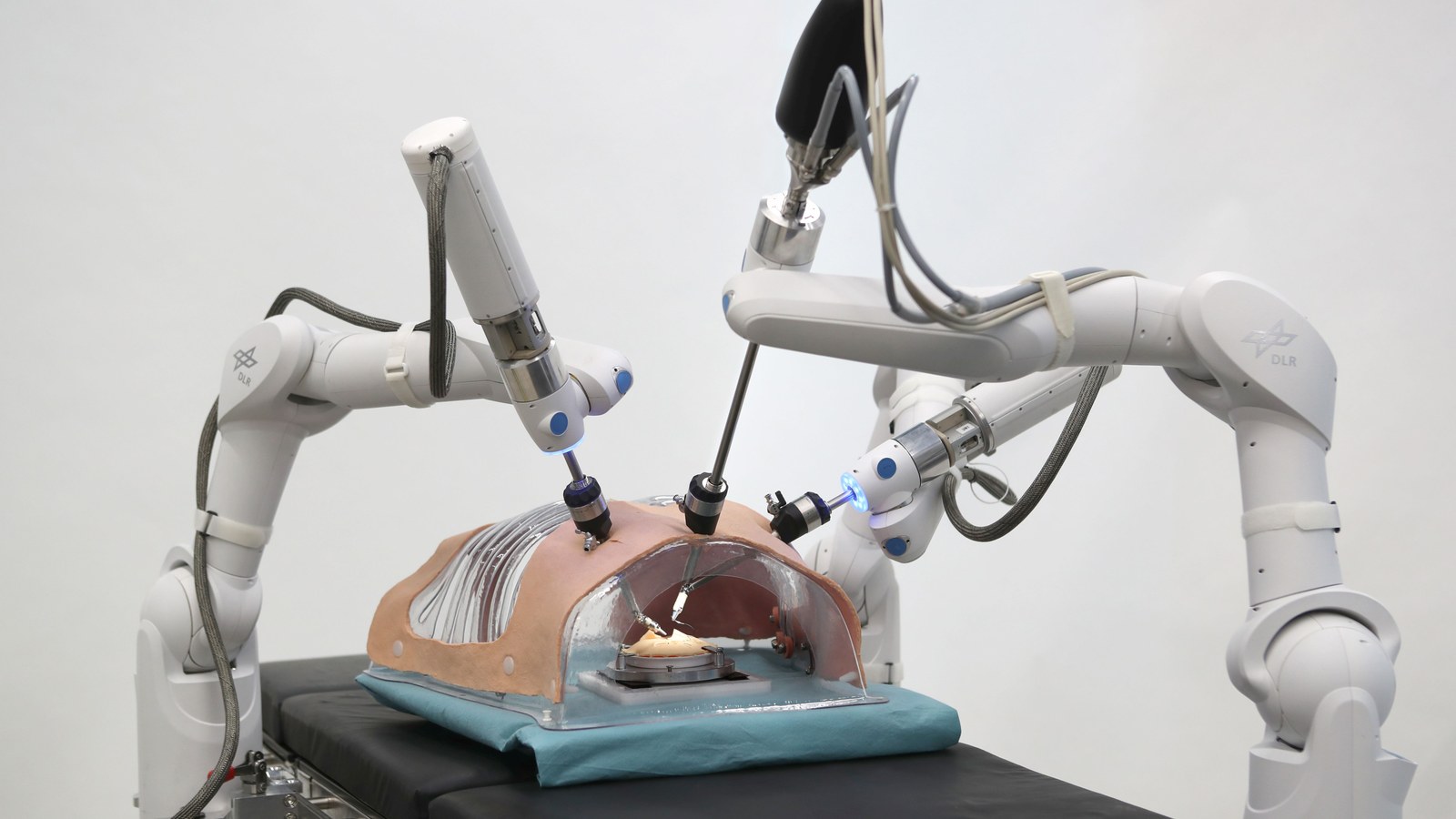
The DLR MiroSurge Research platform for minimally invasive surgery: Two Robot arms carry robotic instruments DLR MICA, the third arm the endoscope (black). Due to their low weight, the MIROs can be attached directly to the side rails of the OR table.
The use of some robot technologies originally developed for space applications is also possible in medical diagnostics and interventions. Medical robotics supports the attending physician in complex procedures, for example in minimally invasive surgery, in order to be able to perform such interventions reproducibly, safely and gently for the patient.
In the last decades robotics and mechatronics have found their way into many medical applications. Especially surgery has shown large potential for the use of robotic systems. The goal in medical robotics is thereby not to replace the surgeon by a robot, but to provide the surgeon with new treatment options to the benefit of the patient. Although this technology is still in its early stages, it will considerably change future surgery.
Since the 1990ies the Institute of Robotics and Mechatronics contributes to this process with various research activities. The successfully completed projects include among others the implementation of a robot-assisted endoscope guidance (1996–2008), the development of the ventricular assist device (VAD) DLR Heart (2002–2004), and the development of the versatile surgical robot DLR KineMedic (2002–2007) in cooperation with Brainlab.
By setting up the MIRO Innovation Lab, we simplify research collaborations between SMEs, hospitals and research facilities in medical robotics domain, in order to provide the best possible support for innovations in this socially relevant area of research.


{kind=link}