
DLR CalDe and DLR CalLab - The DLR Camera Calibration Toolbox - Software available
DLR CalLab emerged late in the year 2005 at the Institute of Robotics and Mechatronics. It followed from the strategic purpose of both upgrading the former CalLab package and at the same time developing a platform independent application. It was decided that a brand new application - independent but inspired by the old CalLab - had to be produced. Having platform independency in mind, it was chosen to develop in the IDL language. In addition to that, this choice yielded reduced development time and boosted performance.
In respect of application design, it was decided to detach features detection from the parameters estimation application. The former task is now performed by the program DLR CalDe, which is completely independent of DLR CalLab, whereas the latter task is exclusively performed by DLR CalLab. Sole interface is plain text files.
The following images give a first impression of the look-and-feel of our calibration toolbox.
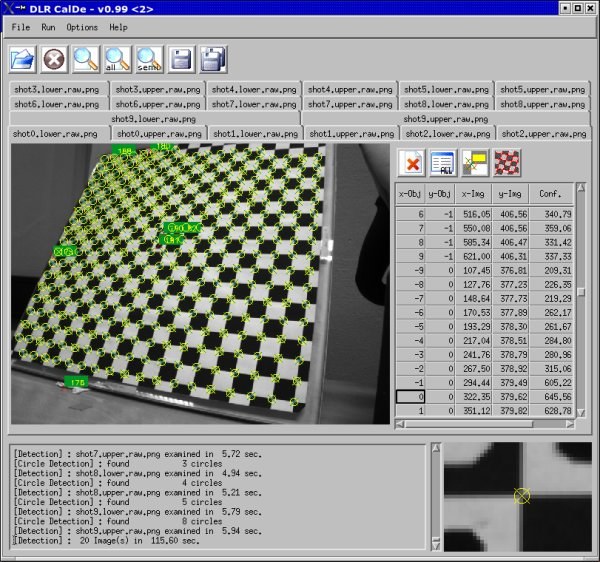
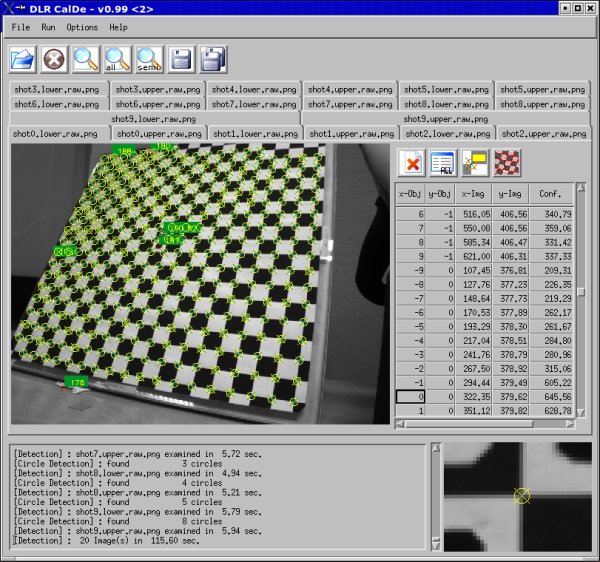
DLR CalDe (DLR Calibration Detection Toolbox):
The detection toolbox DLR CalDe serves the need for localizing landmarks/corners on a chessboard-like 2-D calibration panel with sub-pixel accuracy.
In contrast to the vast majority of similar freely available toolboxes, here the operation is fully automatic. In addition to that, the calibration pattern no longer has to be fully visible within the images. Implications of this fact are twofold: First, makes it possible to calibrate the lens distortion also in the peripheral regions of the image. Second, facilitates the calibration of stereo-cameras and eye-in-hand or eye-to-hand systems, since partially visible patterns suffice for calibration.
However, the application also preserves the possibility of manual interaction and adjustment of the selected landmarks.
Finally, files containing the correspondences between the landmarks of the calibration object and their (stereo) image coordinates are produced. These are starting point for the camera calibration toolbox DLR CalLab.

{kind=link}
Corresponding author: Klaus Strobl. Former authors: Wolfgang Sepp and Stefan Fuchs.
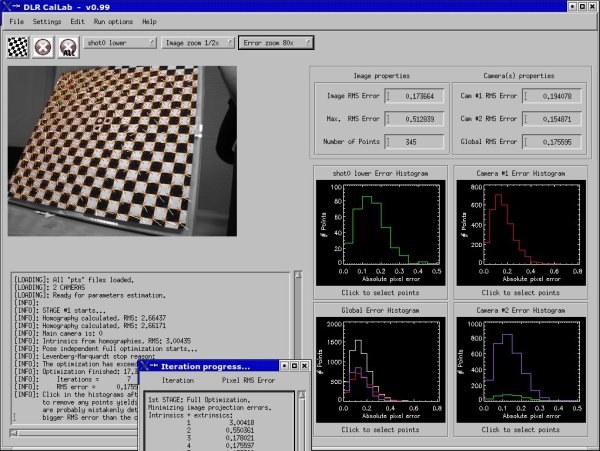
DLR CalLab (DLR Calibration Laboratory):
DLR CalLab estimates both the intrinsic and extrinsic parameters of either a single camera or a stereo-camera (i.e. of a constellation of two or more cameras rigidly attached to each other), on the basis of the previously detected image features (e.g. from DLR CalDe).
Intrinsic parameters describe perspective projection, lens and sensor (e.g. chip) distortions, and the digitization process. These define the nonlinear transformation between coordinates in camera frame and themselves in the image memory frame. In the case of stereo-camera calibration, the rigid-body transfomation(s) between cameras might also be considered as an intrinsic parameter of the stereo-camera instance.
Extrinsic parameters describe the rigid-body transformations between the main camera frame and either the world frame or the Tool Center Point (TCP) frame. The former transformation changes at different instants (camera stations), whereas the latter remains constant as long as the camera(s) stay rigidly attached to the TCP. For camera to TCP calibration (generally known as hand-eye calibration) several previously stated methods (in particular the 2-D image reprojection error minimization as well as different closed form solutions) as well as the novel method presented in Ref. [1] are implemented.
Furthermore, the program offers extensive interaction possibilities:
- choice and parametrization of different numerical optimization algorithms.
- hands-on histograms and images for the selection of features to remove. This task has been taken over by DLR CalLab with respect to DLR CalDe since estimated, reprojected points are central to promptly verify the detected points.
- a variety of estimation methods.
- flexibility in the selection of the lens distortion model - if any - up to radial distortion in 3rd, 5th, and 7th orders, decentering distortion in 2nd and 4th orders, and thin prism distortion in 2nd and 4th orders, similar to the ones in Ref. [2].
- release of aspect ratio and absolute scale of the calibration target, see Ref. [3].
- release of the full calibration target geometry during intrinsic and extrinsic calibrations following the novel methods in Ref. [4].
Nevertheless, it is also possible to perform automatically the whole calibration in one-button-mode.
{kind=link}
Corresponding author: Klaus Strobl.
[1] K. H. Strobl and G. Hirzinger. "Optimal Hand-Eye Calibration." In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, pp. 4647-4653, October 2006.
[2] J. Weng, P. Cohen, and M. Herniou. "Camera calibration with distortion models and accuracy evaluation." In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 14(10): 965-980, 1992.
[3] K. H. Strobl and G. Hirzinger. "More Accurate Camera and Hand-Eye Calibrations with Unknown Grid Pattern Dimensions." In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2008), Pasadena, California, USA, pp. 1398-1405, May 2008.
[4] K. H. Strobl and G. Hirzinger. "More Accurate Pinhole Camera Calibration with Imperfect Planar Target." In Proceedings of the IEEE International Conference on Computer Vision (ICCV 2011), 1st IEEE Workshop on Challenges and Opportunities in Robot Perception, Barcelona, Spain, pp. 1068-1075, November 2011.
Acknowledgments
This work has been partially funded by the European Commission’s Sixth Framework Programme under grant no. 011838 as part of the integrated project SMErobot.